การผสมผสานระหว่างความแม่นยำและการเบี่ยงเบนต่างๆ เข้าด้วยกันเพื่อสร้างความพอดีและโครงสร้างต่างๆ กันเรียกว่าระบบพิกัดความเผื่อ
ระบบความอดทนแบ่งออกเป็นระบบ หลุมและระบบ เพลา.

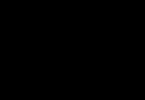
ข้าว. 95. ติดตั้งในระบบรู (a) และในระบบเพลา (b):
1 — แชสซี; 2 - เลื่อน; 3 - กด
ระบบรูคือชุดของความพอดีซึ่งมีระดับความแม่นยำหนึ่งระดับและขนาดระบุหนึ่งขนาด ขนาดรูสูงสุดจะคงที่ และการปรับให้พอดีที่แตกต่างกันทำได้โดยการเปลี่ยนค่าเบี่ยงเบนสูงสุดของเพลา (รูปที่ 95, a) ในระบบเจาะมาตรฐานทั้งหมดพอดี ค่าเบี่ยงเบนของรูก้นจะเป็นศูนย์ หลุมนี้เรียกว่าหลุมหลัก
ระบบเพลาคือชุดของความพอดีซึ่งความเบี่ยงเบนสูงสุดของเพลาจะเท่ากัน (โดยมีขนาดระบุหนึ่งขนาดและระดับความแม่นยำหนึ่งระดับ) และการปรับให้พอดีที่แตกต่างกันทำได้โดยการเปลี่ยนอัตราส่วนขีดจำกัดของรู (รูปที่ 95, b) . ในระบบเพลามาตรฐานทั้งหมดพอดี ส่วนเบี่ยงเบนบนเพลาเป็นศูนย์ เพลานี้เรียกว่าเพลาหลัก
ช่องพิกัดความเผื่อของรูหลักถูกกำหนดด้วยตัวอักษร A และเพลาหลักด้วยตัวอักษร B พร้อมดัชนีตัวเลขของระดับความแม่นยำ (สำหรับระดับความแม่นยำที่ 2 จะไม่ระบุดัชนี 2): A 1, A, A 2a, A 3a, A 4 และ A 5, B 1 B 2, B 2a, B 3, B 3a, B 4, B 5 มาตรฐาน All-Union กำหนดพิกัดความเผื่อและความเหมาะสมสำหรับข้อต่อเรียบ
อนุญาตให้ใช้ไม่เพียงแต่ขนาดพอดีที่กำหนดโดยมาตรฐานเท่านั้น แต่ยังรวมถึงการรวมกันของช่องความอดทนที่ได้มาตรฐานสำหรับรูและเพลาที่มีระดับความแม่นยำเดียวกันหรือต่างกัน
สำหรับการใช้งานที่ต้องการซึ่งมีขนาดระบุ 1 + 500 มม. จะมีการกำหนดช่องพิกัดความเผื่อสองแถวสำหรับรูและเพลาไว้ ก่อนอื่น ควรใช้ฟิลด์ความอดทนของแถวที่ 1 จากนั้นจึงใช้ฟิลด์ความอดทนของแถวที่ 2 เฉพาะในกรณีพิเศษเท่านั้น หากจำเป็น สามารถใช้ฟิลด์ค่าเผื่อที่เหลือได้
แถวแรกของคลาสความแม่นยำที่ 2 รวมถึงฟิลด์พิกัดความเผื่อที่เหมาะสม N, C, X และแถวที่สอง - Pr, G, P, D และ L ผ่านการสังเกตในระยะยาว การพึ่งพาการเปลี่ยนแปลงของพิกัดความเผื่อบน กำหนดขนาดของพื้นผิวที่ผ่านการประมวลผลแล้ว ความสัมพันธ์นี้แสดงเป็นลูกบาศก์พาราโบลา การเปรียบเทียบความคลาดเคลื่อนสำหรับขนาดพื้นผิวที่แตกต่างกันและความแม่นยำเดียวกันนั้นทำได้โดยใช้หน่วยความคลาดเคลื่อน จำนวนหน่วยเหล่านี้รวมอยู่ในค่าความคลาดเคลื่อนของการรักษาพื้นผิวเป็นตัวกำหนดระดับความแม่นยำในการประมวลผล สำหรับแต่ละคลาสความแม่นยำ จะมีหน่วยพิกัดความเผื่อจำนวนหนึ่งมาให้ ค่าที่ยอมรับได้จะเท่ากับ ai โดยที่ a คือจำนวนหน่วยที่ยอมรับได้ i คือค่าของหน่วยที่ยอมรับได้
ตาม GOST หน่วยความอดทน i เป็นไมครอนแสดงโดยการขึ้นต่อกันต่อไปนี้:
สำหรับรูที่มีเส้นผ่านศูนย์กลาง 0.1-1 มม
สำหรับรูที่มีเส้นผ่านศูนย์กลาง 1–500 มม
![]()
สำหรับรูที่มีเส้นผ่านศูนย์กลาง 500–10,000 มม
โดยที่ d c.a คือค่าเฉลี่ยเลขคณิตของช่วงเส้นผ่านศูนย์กลางเป็นมิลลิเมตร บนภาพวาดการเบี่ยงเบนจะแสดงด้วยวิธีใดวิธีหนึ่งจากสองวิธี:
1) ระบุขนาดและ การกำหนดตัวอักษรตัวอย่างเช่นการลงจอดที่มีการเลื่อนแบบพอดีของคลาสความแม่นยำที่ 2 สำหรับรูระบบเพลาที่มีเส้นผ่านศูนย์กลาง 30 มม. ความพอดีนั้นถูกกำหนดไว้ที่ 30C สำหรับแบบวิ่งของคลาสที่ 3 - 30X 3; ขนาดของเพลาหลักถูกกำหนดให้เป็น 30V สำหรับกรณีแรกและ 30V 3 สำหรับวินาที ด้วยระบบรู รูหลักจะถูกกำหนดเป็น 30A และ 30A 3 และขนาดพอดีจะถูกระบุบนขนาดเพลาตามลำดับ
2) ระบุขนาดและค่าตัวเลข การเบี่ยงเบนที่อนุญาตตัวอย่างเช่นในหน่วยมิลลิเมตรสำหรับรูที่มีเส้นผ่านศูนย์กลาง 30 มม. ในระบบเพลาที่มีการเลื่อนระดับความแม่นยำที่ 2 จะถูกเขียนเป็นØ30 +0.027; สำหรับการลงจอดของคลาสความแม่นยำที่ 3 เขียนไว้ 30 +0.05; ขนาดของเพลาหลักจะกำหนดØ 50 -0.017
ด้วยระบบรู ขนาดของรูหลักของคลาสที่ 2 จะเป็น Ø 30 +0.027 และสำหรับคลาสที่สาม Ø 30 +0.05 สำหรับการพอดีแบบเลื่อนของคลาสความแม่นยำที่ 2 ในระบบรู ขนาดเพลาจะเป็น Ø 30 -0.017 และสำหรับแบบรันนิ่งฟิตของคลาส 3 Ø 30 -0.05
ในทุกกรณี ค่าตัวเลขของการเบี่ยงเบนด้านบนจะระบุอยู่เหนือลูกศรขนาด และค่าเบี่ยงเบนที่ต่ำกว่า - อยู่ด้านล่าง ไม่ได้ระบุค่าเบี่ยงเบนเท่ากับศูนย์บนภาพวาด
ในงานวิศวกรรมเครื่องกล ระบบรูส่วนใหญ่จะใช้เนื่องจากต้องใช้น้อยกว่า เครื่องมือตัดกับ ขนาดต่างๆตัวอย่างเช่น สำหรับความพอดีทั้งหมดของระดับความแม่นยำเดียวกันในขนาดระบุที่แน่นอน จะต้องใช้รีมเมอร์ที่มีเส้นผ่านศูนย์กลางเท่ากัน ด้วยระบบการประมวลผลเพลา หลุมต่างๆต้องใช้รีมเมอร์หรือเจาะ เส้นผ่านศูนย์กลางต่างกันตาม ขนาดที่แตกต่างกันรูสำหรับใส่ได้หลากหลาย โดยปกติแล้วการประมวลผลเพลาจะดำเนินการโดยใช้เครื่องมือ (คัตเตอร์ ล้อเจียร ฯลฯ) ซึ่งขนาดไม่เกี่ยวข้องกับลักษณะของความพอดี
รีมเมอร์ สว่าน และเครื่องมือสอบเทียบอื่น ๆ (ขนาดเส้นผ่านศูนย์กลางที่กำหนดขนาดของพื้นผิวที่ประมวลผล) มีราคาค่อนข้างแพง ดังนั้นจึงนิยมใช้ระบบรูด้วยเหตุผลทางเศรษฐกิจ
อย่างไรก็ตามในบางกรณีการใช้ระบบเพลาจะเหมาะสมกว่า โดยหลักแล้วจะใช้ในกรณีที่ต้องวางชิ้นส่วนหลายชิ้นที่มีความพอดีต่างกันไว้บนเพลาเดียวกัน ในกรณีนี้ เมื่อใช้ระบบรู เพลาจะต้องดำเนินการเป็นขั้นตอน และจะไม่อนุญาตให้ประกอบเสมอไป
2. ระบบรูและระบบเพลา คุณสมบัติ ข้อแตกต่าง ข้อดี
ในระหว่างการประกอบ ชิ้นส่วนที่จะเชื่อมต่อจะสัมผัสกันโดยพื้นผิวแยกกัน ซึ่งเรียกว่าพื้นผิวผสมพันธุ์ ขนาดของพื้นผิวเหล่านี้เรียกว่าขนาดการผสมพันธุ์ (เช่น เส้นผ่านศูนย์กลางของรูบุชชิ่งและเส้นผ่านศูนย์กลางของเพลาที่บุชชิ่งอยู่) ความแตกต่างเกิดขึ้นระหว่างพื้นผิวของผู้หญิงและผู้ชาย และมิติของชายและหญิงตามลำดับ พื้นผิวปิดล้อมมักเรียกว่ารู และพื้นผิวตัวผู้เรียกว่าเพลา
ส่วนต่อประสานมีขนาดระบุหนึ่งขนาดสำหรับรูและเพลา และขนาดสูงสุดมักจะแตกต่างกัน
หากขนาดจริง (วัด) ของผลิตภัณฑ์ที่ผลิตไม่เกินขนาดสูงสุดที่ใหญ่ที่สุดและเล็กที่สุด แสดงว่าผลิตภัณฑ์นั้นตรงตามข้อกำหนดของแบบร่างและผลิตอย่างถูกต้อง
การก่อสร้าง อุปกรณ์ทางเทคนิคและผลิตภัณฑ์อื่นๆ ต้องมีการสัมผัสชิ้นส่วนผสมพันธุ์ที่แตกต่างกัน บางส่วนต้องสามารถเคลื่อนย้ายได้โดยสัมพันธ์กับส่วนอื่นๆ ในขณะที่บางส่วนต้องสร้างการเชื่อมต่อแบบตายตัว
ลักษณะของการเชื่อมต่อของชิ้นส่วนซึ่งกำหนดโดยความแตกต่างระหว่างเส้นผ่านศูนย์กลางของรูและเพลาซึ่งสร้างอิสระในการเคลื่อนไหวสัมพัทธ์มากขึ้นหรือน้อยลงหรือระดับความต้านทานต่อการกระจัดร่วมกันเรียกว่าพอดี
การลงจอดมีสามกลุ่ม: เคลื่อนย้ายได้ (มีช่องว่าง), คงที่ (มีการรบกวน) และการเปลี่ยนผ่าน (อาจมีช่องว่างหรือการรบกวน)
ช่องว่างเกิดขึ้นจากความแตกต่างเชิงบวกระหว่างขนาดของเส้นผ่านศูนย์กลางรูและเพลา หากความแตกต่างนี้เป็นลบ ความพอดีจะเป็นการแทรกแซงพอดี
มีช่องว่างและการรบกวนที่ใหญ่ที่สุดและเล็กที่สุด ระยะห่างที่ใหญ่ที่สุดคือความแตกต่างเชิงบวกระหว่างขนาดรูจำกัดที่ใหญ่ที่สุดและขนาดเพลาจำกัดที่เล็กที่สุด
ช่องว่างที่เล็กที่สุดคือความแตกต่างเชิงบวกระหว่างขนาดรูจำกัดที่เล็กที่สุดและขนาดเพลาจำกัดที่ใหญ่ที่สุด
การรบกวนที่ยิ่งใหญ่ที่สุดคือความแตกต่างเชิงบวกระหว่างขนาดเพลาสูงสุดที่ใหญ่ที่สุดและขนาดรูสูงสุดที่เล็กที่สุด
การรบกวนขั้นต่ำคือความแตกต่างเชิงบวกระหว่างขนาดเพลาสูงสุดที่เล็กที่สุดและขนาดรูสูงสุดที่ใหญ่ที่สุด
การรวมกันของช่องพิกัดความเผื่อสองช่อง (รูและเพลา) จะกำหนดลักษณะของความพอดี กล่าวคือ การมีช่องว่างหรือการรบกวนอยู่
ระบบของความคลาดเคลื่อนและความพอดีกำหนดว่าในคู่ครองแต่ละส่วน (ส่วนหลัก) มีการเบี่ยงเบนเท่ากับศูนย์ ขึ้นอยู่กับว่าชิ้นส่วนใดที่ได้รับการยอมรับว่าเป็นชิ้นส่วนหลัก ความแตกต่างระหว่างความพอดีในระบบรูและความพอดีในระบบเพลา
อุปกรณ์ฟิตติ้งในระบบรูคืออุปกรณ์ฟิตติ้งที่ได้รับระยะห่างและความตึงต่างๆ โดยการเชื่อมต่อเพลาต่างๆ เข้ากับรูหลัก
อุปกรณ์เชื่อมต่อในระบบเพลาคือการลงจอดซึ่งมีระยะห่างและการรบกวนต่างๆ โดยการต่อรูต่างๆ เข้ากับเพลาหลัก
ควรใช้ระบบรูจะดีกว่า ควรใช้ระบบเพลาเมื่อคำนึงถึงการออกแบบหรือเศรษฐศาสตร์ (เช่น บุชชิ่งหลายอัน มู่เล่ หรือล้อที่มี การลงจอดที่แตกต่างกันบนเพลาเรียบอันเดียว)
3. ความคลาดเคลื่อนและความพอดีของการเชื่อมต่อแบบใช้กุญแจ
การเชื่อมต่อแบบใช้กุญแจคือการเชื่อมต่อประเภทหนึ่งระหว่างเพลาและบุชชิ่งโดยใช้องค์ประกอบโครงสร้างเพิ่มเติม (กุญแจ) ที่ออกแบบมาเพื่อป้องกันการหมุนซึ่งกันและกัน ส่วนใหญ่แล้ว กุญแจจะใช้เพื่อส่งแรงบิดในการเชื่อมต่อระหว่างเพลาที่กำลังหมุนกับเฟืองหรือรอก แต่วิธีแก้ปัญหาอื่นๆ ก็สามารถทำได้เช่นกัน เช่น การป้องกันเพลาจากการหมุนโดยสัมพันธ์กับตัวเรือนที่อยู่นิ่ง แตกต่างจากการเชื่อมต่อแบบรบกวนซึ่งทำให้ชิ้นส่วนไม่สามารถเคลื่อนที่ร่วมกันได้โดยไม่ต้องเพิ่มเติม องค์ประกอบโครงสร้างการเชื่อมต่อแบบคีย์สามารถถอดออกได้ ช่วยให้สามารถถอดประกอบโครงสร้างและประกอบกลับเข้าไปใหม่ได้ โดยให้ผลเช่นเดียวกับในระหว่างการประกอบครั้งแรก
การเชื่อมต่อที่สำคัญประกอบด้วยความพอดีอย่างน้อยสามแบบ: บุชชิ่งเพลา (คู่ที่อยู่ตรงกลาง) ร่องลิ่มเพลา และร่องลิ่มบุชชิ่ง ความแม่นยำในการตั้งศูนย์กลางของชิ้นส่วนในการเชื่อมต่อแบบใช้กุญแจนั้นมั่นใจได้ด้วยความพอดีของปลอกบนเพลา นี่คือการจับคู่ทรงกระบอกเรียบแบบธรรมดาที่สามารถติดตั้งได้โดยมีช่องว่างหรือการรบกวนน้อยมาก ดังนั้นจึงแนะนำให้ใช้ขนาดที่พอดีระหว่างการเปลี่ยนผ่าน ในการผสมพันธุ์ (ห่วงโซ่มิติ) ตามความสูงของกุญแจ จะมีระยะห่างเล็กน้อยเป็นพิเศษ (ความลึกรวมของร่องของปลอกและเพลามากกว่าความสูงของกุญแจ) สามารถเชื่อมต่ออย่างอื่นได้ - ตามความยาวของกุญแจหากวางกุญแจคู่ขนานที่มีปลายโค้งมนไว้ในร่องตาบอดบนเพลา
การเชื่อมต่อแบบกุญแจสามารถเคลื่อนย้ายหรือยึดตามทิศทางตามแนวแกนได้ ในข้อต่อที่เคลื่อนที่ได้ มักใช้กุญแจนำทางและยึดเข้ากับเพลาด้วยสกรู ล้อเฟือง (บล็อก) มักจะเคลื่อนที่ไปตามเพลาพร้อมกับกุญแจนำทาง ล้อเกียร์) ข้อต่อครึ่งตัวหรือส่วนอื่นๆ กุญแจที่ติดอยู่กับบุชชิ่งยังทำหน้าที่ส่งแรงบิดหรือป้องกันไม่ให้บุชชิ่งหมุนขณะเคลื่อนที่ไปตามเพลาที่อยู่นิ่ง เช่นเดียวกับที่ทำในฉากยึดของชั้นวางหนักสำหรับวัดหัว เช่น ไมโครแคเตอร์ ในกรณีนี้ไกด์จะเป็นเพลาที่มีรูสลัก
ตามรูปร่างของมัน กุญแจจะถูกแบ่งออกเป็นปริซึม ปล้อง ลิ่ม และวงสัมผัส มาตรฐานนี้กำหนดไว้สำหรับการออกแบบคีย์บางประเภทที่แตกต่างกัน
ปุ่มขนานทำให้สามารถรับการเชื่อมต่อทั้งแบบเคลื่อนย้ายได้และแบบตายตัว ตามกฎแล้วคีย์เซ็กเมนต์และคีย์ลิ่มจะใช้เพื่อสร้างข้อต่อคงที่ รูปร่างและขนาดของส่วนต่างๆ ของกุญแจและร่องได้รับมาตรฐานและเลือกโดยขึ้นอยู่กับเส้นผ่านศูนย์กลางของเพลา และประเภทของการเชื่อมต่อกุญแจจะขึ้นอยู่กับสภาพการทำงานของการเชื่อมต่อ
ค่าเบี่ยงเบนสูงสุดของความลึกของร่องบนเพลา t1 และในปลอก t2 แสดงไว้ในตารางที่ 1:
ตารางที่ 1
ความกว้าง ข – h9;
ความสูง h – h9 และสำหรับ h มากกว่า 6 มม. – h11
ขึ้นอยู่กับลักษณะ (ประเภท) ของการเชื่อมต่อรูสลัก มาตรฐานจะกำหนดขอบเขตพิกัดความเผื่อต่อไปนี้สำหรับความกว้างของร่อง:
เพื่อให้มั่นใจในคุณภาพของการเชื่อมต่อที่สำคัญซึ่งขึ้นอยู่กับความแม่นยำของตำแหน่งของระนาบสมมาตรของร่องของเพลาและปลอกแขน จะมีการกำหนดและระบุความคลาดเคลื่อนของความสมมาตรและความขนานตาม GOST 2.308-79
ค่าตัวเลขของความคลาดเคลื่อนของตำแหน่งถูกกำหนดโดยสูตร:
T = 0.6 ที sp
T = 4.0 T เอสพี
โดยที่ T sp – ความคลาดเคลื่อนสำหรับความกว้างของร่องสลัก b.
ค่าที่คำนวณได้จะถูกปัดเศษเป็นค่ามาตรฐานตาม GOST 24643-81
ความหยาบของพื้นผิวร่องสลักถูกเลือกขึ้นอยู่กับระยะเผื่อพิกัดความเผื่อของขนาดร่องสลัก (Ra 3.2 µm หรือ 6.3 µm)
สัญลักษณ์สำหรับปุ่มขนานประกอบด้วย:
คำว่า "Spline";
การกำหนดเวอร์ชัน (ไม่ได้ระบุเวอร์ชัน 1)
ขนาดหน้าตัด bxh และความยาวกุญแจ l;
การกำหนดมาตรฐาน
ตัวอย่าง เครื่องหมายคีย์ขนานรุ่น 2 ขนาด b = 4 มม., h = 4 มม., l = 12 มม
คีย์ 2 - 4 x 4 x 12 GOST 23360-78
ปุ่มนำแบบขนานถูกยึดไว้ในร่องเพลาด้วยสกรู ใช้สำหรับกดปุ่มออกระหว่างการรื้อ รูเกลียว. ตัวอย่างของสัญลักษณ์สำหรับคีย์ไกด์แบบแท่งปริซึมรุ่น 3 ที่มีขนาด b = 12 มม., h = 8 มม., l = 100 มม. คีย์ 3 - 12 x 8 x 100 GOST 8790-79
ตามกฎแล้วจะใช้เซกเมนต์คีย์เพื่อส่งแรงบิดเล็กน้อย ขนาดของเซ็กเมนต์คีย์และรูสลัก (GOST 24071-80) จะถูกเลือกขึ้นอยู่กับเส้นผ่านศูนย์กลางของเพลา
การขึ้นอยู่กับฟิลด์ความอดทนของความกว้างร่องของการเชื่อมต่อคีย์เซ็กเมนต์กับลักษณะของการเชื่อมต่อคีย์:
อนุญาตให้ใช้กับชิ้นส่วนที่ผ่านการอบร้อน ส่วนเบี่ยงเบนสูงสุดความกว้างของร่องเพลาคือ H11 ความกว้างของร่องบุชชิ่งคือ D10
มาตรฐานกำหนดฟิลด์ค่าเผื่อต่อไปนี้สำหรับขนาดคีย์:
ความกว้าง ข – h9;
ความสูง ชั่วโมง (h1) - h11;
เส้นผ่านศูนย์กลาง D - h12
สัญลักษณ์ของคีย์ปล้องประกอบด้วยคำว่า "คีย์" การกำหนดการดำเนินการ (ไม่ได้ระบุเวอร์ชัน 1) ขนาดหน้าตัด bxh (h1); การกำหนดมาตรฐาน
ลิ่มลิ่มใช้ในข้อต่อคงที่เมื่อข้อกำหนดในการจัดตำแหน่งของชิ้นส่วนที่เชื่อมต่อมีน้อย ขนาดของลิ่มลิ่มและร่องสลักได้รับมาตรฐานโดย GOST 24068-80 ความยาวของร่องบนเพลาสำหรับคีย์เรียวของการออกแบบ 1 นั้นเท่ากับ 2l สำหรับการออกแบบอื่น ๆ ความยาวของร่องจะเท่ากับความยาว l ของคีย์ที่ฝังอยู่
ค่าเบี่ยงเบนสูงสุดของขนาด b, h, l สำหรับลิ่มคีย์จะเหมือนกับคีย์ปริซึม (GOST 23360-78) ตามความกว้างของปุ่ม b มาตรฐานจะสร้างการเชื่อมต่อตามความกว้างของร่องของเพลาและปลอกโดยใช้ช่องพิกัดความเผื่อ D10 ความยาวของร่องเพลา L คือ H15 ค่าเบี่ยงเบนความลึกสูงสุด t1 และ t2 สอดคล้องกับค่าเบี่ยงเบนสำหรับคีย์แบบขนาน จำกัดความเบี่ยงเบนของมุมเอียงของขอบด้านบนของคีย์และร่อง ± AT10/2 ตาม GOST 8908-81 ตัวอย่างสัญลักษณ์สำหรับลิ่มลิ่ม เวอร์ชัน 2 ขนาด b = 8 มม., h = 7 มม., l = 25 มม.: คีย์ 2 - 8 x 7 x 25 GOST 24068-80
การตรวจสอบองค์ประกอบการเชื่อมต่อแบบคีย์ วิธีการสากลการวัดทำได้ยากอย่างมากเนื่องจากขนาดตามขวางมีขนาดเล็ก ดังนั้นจึงมีการใช้คาลิเปอร์อย่างกว้างขวางในการควบคุม
ตามหลักการของเทย์เลอร์ พาสทรูเกจสำหรับตรวจสอบรูรูกุญแจคือเพลาที่มีกุญแจ เท่ากับความยาวความยาวของรูกุญแจหรือรูกุญแจ ความสามารถนี้ให้การควบคุมที่ครอบคลุมทุกขนาด รูปร่าง และตำแหน่งของพื้นผิว ชุดเกจ no-go ได้รับการออกแบบมาเพื่อการควบคุมแบบทีละองค์ประกอบ และรวมถึงเกจแบบ no-go สำหรับการตรวจสอบรูตรงกลาง (ปลั๊กแบบ no-go ที่ราบรื่นของโปรไฟล์ทั้งหมดหรือบางส่วน) และเทมเพลตสำหรับการควบคุมแบบทีละองค์ประกอบ ของความกว้างและความลึกของรูกุญแจ
พาสทรูเกจสำหรับตรวจสอบเพลาที่มีร่องสลักคือปริซึม (“ไรเดอร์”) โดยมีส่วนที่ยื่นออกมาเท่ากับความยาวของร่องสลักหรือความยาวของร่องสลัก ชุดเกจแบบไม่ต้องเคลื่อนที่ได้รับการออกแบบมาเพื่อการควบคุมทีละองค์ประกอบ และมีขายึดเกจแบบไม่ต้องเคลื่อนที่สำหรับตรวจสอบขนาดของพื้นผิวที่อยู่ตรงกลางของเพลา และเทมเพลตสำหรับการควบคุมความกว้างและความลึกแบบองค์ประกอบต่อองค์ประกอบ ของรูกุญแจ
ในวิศวกรรมเครื่องกล เป็นเรื่องปกติที่จะแยกแยะระหว่างขนาดผสมพันธุ์และขนาดฟรี
ตัวอย่าง การผสมพันธุ์ขนาดสามารถให้บริการได้ เส้นผ่านศูนย์กลางภายนอกลูกสูบค้อนลมและจับคู่กับมัน เส้นผ่าศูนย์กลางภายในกระบอกสูบที่ลูกสูบเคลื่อนที่ไปมา ในกรณีนี้ พื้นผิวทรงกระบอกของลูกสูบค้อนเป็นพื้นผิวด้านนอกทั่วไปของเพลา และพื้นผิวด้านในของกระบอกสูบเป็นพื้นผิวด้านในทั่วไปของรู
เพื่อความกระชับจะเรียกว่าพื้นผิวด้านนอกของชิ้นส่วนผสมพันธุ์ เพลา,และภายใน – รู.นอกจากนี้ยังใช้กับพื้นผิวที่มีรูปร่างแตกต่างจากทรงกระบอกอย่างเห็นได้ชัด ดังนั้นในการผสมพันธุ์คีย์กับกรูฟ ร่องคือรู และคีย์คือเพลา
ตัวอย่าง ฟรีขนาดอาจเป็นความยาวของปลอกภาชนะกดไฮดรอลิกแนวนอน, เส้นผ่านศูนย์กลางภายนอกของหน้าแปลน, เส้นผ่านศูนย์กลางของหัวหมุดย้ำ ฯลฯ
ระบบพิกัดความเผื่อซึ่งใช้ขนาดเพลาสูงสุดคงที่เป็นพื้นฐานเรียกว่า ระบบเพลา(รูปที่ 2, ก). สามารถเชื่อมต่อต่างๆ ด้วยขนาดเพลาสูงสุดได้โดยการเปลี่ยนฟิลด์พิกัดความเผื่อของรูตามความจำเป็น ในภาพวาดระบบเพลาถูกกำหนดด้วยตัวอักษร "B" พร้อมด้วยดัชนีของระดับความแม่นยำในการประมวลผลและเขียนทางด้านขวาของขนาดที่ระบุเช่น 50B 3 เส้นผ่านศูนย์กลางที่แท้จริงของเพลาภายในเกณฑ์ความคลาดเคลื่อนจะน้อยกว่าเส้นผ่านศูนย์กลางระบุเสมอ ในบางกรณี จะเท่ากับเส้นผ่านศูนย์กลาง แต่ไม่ใหญ่กว่านี้
ระบบความคลาดเคลื่อนซึ่งใช้ขนาดรูสูงสุดคงที่เป็นพื้นฐานเรียกว่า ระบบรู(รูปที่ 2, ข). การเชื่อมต่อต่างๆ ที่มีขนาดรูสูงสุดได้มาจากการเปลี่ยนฟิลด์พิกัดความเผื่อของเพลา ในภาพวาด ระบบรูถูกกำหนดด้วยตัวอักษร "A" โดยมีดัชนีของระดับความแม่นยำในการประมวลผลและเขียนทางด้านขวาของขนาดที่ระบุ เช่น 50A 3 ขนาดที่แท้จริงของรูนั้นใหญ่กว่าขนาดที่ระบุเสมอภายใต้เกณฑ์ความคลาดเคลื่อน ในบางกรณี อาจเท่ากับรูนั้นได้ แต่ก็ไม่เคยเล็กลง
1.4. การลงจอด
ในวิศวกรรมเครื่องกล เมื่อประกอบชิ้นส่วนเป็นชิ้นส่วนประกอบ และประกอบเป็นเครื่องจักรหรือชุดประกอบ พื้นผิวที่จับคู่ที่มีรูปร่างเหมือนกันจะถูกจับคู่กัน ซึ่งจะพอดีกันหรืออยู่ติดกัน ลักษณะของการจับคู่จะถูกกำหนด ลงจอด,ซึ่งเข้าใจว่าเป็นระดับความแข็งแกร่งของการเชื่อมต่อของชิ้นส่วนที่ผสมพันธุ์หรือความอิสระในการเคลื่อนไหวที่สัมพันธ์กัน อุปกรณ์ประกอบถูกสร้างขึ้นโดยความแตกต่างของขนาดของชิ้นส่วนที่จับคู่กัน (เพลาและรู) ที่รวมอยู่ในคู่ การลงจอดมีสามประเภทหลัก - การลงจอดที่มีช่องว่างหรือการเคลื่อนย้ายการลงจอดแบบเปลี่ยนผ่านและการรบกวนพอดีหรือแบบคงที่ (กด)
ที่ มือถือในระหว่างการลงจอด ชิ้นส่วนที่จับคู่ผสมพันธุ์สามารถเคลื่อนที่ร่วมกันระหว่างการทำงานในทิศทางที่แน่นอน ความพอดีประเภทนี้ใช้เมื่อเชื่อมต่อลูกสูบเข้ากับกระบอกสูบ เพื่อให้แน่ใจว่าใส่ได้พอดี จำเป็นต้องมีเส้นผ่านศูนย์กลางกระบอกสูบใหญ่กว่าเส้นผ่านศูนย์กลางลูกสูบเล็กน้อย ความแตกต่างระหว่างเส้นผ่านศูนย์กลางของกระบอกสูบและลูกสูบ (โดยทั่วไประหว่างเส้นผ่านศูนย์กลางของรูและเพลา) เรียกว่า ช่องว่าง; เช่น มีเส้นผ่านศูนย์กลางรู 50 มม , แกน – 49.8 มม ช่องว่างจะอยู่ที่ 0.2 มม . จากนี้ไปช่องว่างจะเป็นค่าบวก
ที่ ไม่นิ่งเมื่อลงจอดชิ้นส่วนที่จับคู่ผสมพันธุ์จะเชื่อมต่อกันอย่างแน่นหนา ไม่รวมการเคลื่อนไหวร่วมกันระหว่างการดำเนินการ การพอดีแบบตายตัวทำได้โดยการบังคับเพลาเข้าไปในรู เพื่อให้ได้ขนาดที่พอดี จำเป็นต้องมีเส้นผ่านศูนย์กลางของเพลาก่อนที่จะกดให้ใหญ่กว่าเส้นผ่านศูนย์กลางของรูเล็กน้อย เรียกว่าความแตกต่างระหว่างเส้นผ่านศูนย์กลางของเพลาและรู การรบกวน.
ที่ หัวต่อหัวเลี้ยวพอดีเพื่อให้แน่ใจว่าหลุมอยู่ตรงกลางที่ดี การรบกวนอาจเป็นบวกหรือลบ ที่ข้อต่อเกิดการรบกวนหรือช่องว่างดังนั้นส่วนใหญ่จึงมั่นใจได้ว่าชิ้นส่วนการผสมพันธุ์ไม่สามารถเคลื่อนที่ได้โดยใช้ตัวยึด (กุญแจ, หมุดผ่า ฯลฯ ); ความแตกต่างระหว่างเส้นผ่านศูนย์กลางของเพลาและรูไม่มีนัยสำคัญซึ่งเป็นผลมาจากการรบกวนหรือช่องว่างที่มีขนาดเล็ก
ขึ้นอยู่กับระดับความแรงของการเชื่อมต่อ ในทางปฏิบัติมีการใช้การลงจอดแบบเคลื่อนย้ายได้การเปลี่ยนผ่านและแบบคงที่หลายประเภท จากการลงจอดแบบเคลื่อนย้ายได้ในวิศวกรรมเครื่องกลสมัยใหม่ที่ใช้บ่อยที่สุดคือ: 1) การลงจอดแบบเลื่อน C; 2) การเคลื่อนไหว D; 3) แชสซี X; 4) มอเตอร์เท็กซัส; วิ่งง่าย L; 6) จังหวะกว้าง W; จากการลงจอดเฉพาะกาล: 1) blind G; 2) T แน่น; 3) ตึงเครียด H; 4) P หนาแน่น; จากการกดแบบคงที่พอดี: 1) Gr ร้อน; 2) กด ปร; 3) กดไฟ Pl.
การสวมแบบเลื่อนที่มีระยะห่างน้อยมากใช้สำหรับชิ้นส่วนที่เคลื่อนที่ช้าๆ (เช่น ปากกาขนนกในตัวเรือนส่วนท้าย) กลึง, แกนหมุน เครื่องเจาะและอื่นๆ) การเคลื่อนที่พอดีซึ่งมีระยะห่างเล็กน้อย ช่วยให้แกนของเพลาและรู (สปินเดิลของเครื่องกลึง หัวแบ่ง ฯลฯ) ตรงกัน ชุดวิ่งที่มีช่องว่างที่เห็นได้ชัดเจนมีการใช้กันอย่างแพร่หลายที่สุดในวิศวกรรมเครื่องกลสำหรับชิ้นส่วนที่หมุนด้วยความเร็วปานกลาง (เพลาข้อเหวี่ยงในแบริ่งหลัก ลิ้นปีกผีเสื้อในปลอกวาล์วของค้อนลมไอน้ำ ฯลฯ) การลงจอดที่วิ่งง่ายพร้อมช่องว่างที่สำคัญมีการเคลื่อนไหวซึ่งกันและกันของส่วนหนึ่งไปยังอีกส่วนหนึ่งในระหว่างการหมุนด้วยความเร็วสูงหรือความเร็วปานกลาง แต่มีความยาวแบริ่งยาว (เพลา ปั๊มหอยโข่ง,เพลาขับของเครื่องเจียรทรงกระบอก ฯลฯ) อุปกรณ์ฟิตติ้งช่วงชักกว้างที่มีระยะห่างที่สำคัญมากจะใช้ในกรณีที่ความเร็วในการหมุนสูงมากและอาจเกิดการบิดเบี้ยวระหว่างการประกอบได้ (เพลาในตลับลูกปืนยาว รอกคนเดินเตาะแตะบนเพลา ฯลฯ)
Blind Fit ใช้สำหรับชิ้นส่วนที่ไม่ควรรื้อออกระหว่างการใช้งานทั้งหมด (เฟืองบนเพลาของเครื่องผสมคอนกรีตหรือเครื่องตีขึ้นรูป ฯลฯ) ทรงรัดรูปทำให้เกิดการรบกวนน้อยกว่าทรงรัดรูป ใช้สำหรับชิ้นส่วนและชุดประกอบที่สามารถเปลี่ยนแปลงได้ในระหว่างการซ่อมแซมครั้งใหญ่ (ลูกรอกแบบขั้นบนเพลาขับของสายพานลำเลียงหรือเครื่องเจียรทรงกระบอก ฯลฯ ) ขนาดที่พอดีจะทำให้เกิดสัญญาณรบกวนเป็นศูนย์หรือเป็นลบ พบในหน่วยและชิ้นส่วนที่ต้องเปลี่ยนโดยไม่ต้อง ความพยายามพิเศษสำหรับการซ่อมเล็กๆ น้อยๆ (เกียร์ในเครื่องตัดโลหะ ฯลฯ) ขนาดที่พอดีนั้นมีลักษณะเฉพาะจากการรบกวนทางลบ (การกวาดล้าง); ใช้ในหน่วยที่ต้องประกอบและถอดชิ้นส่วนระหว่างการใช้งาน (เกียร์ที่เปลี่ยนได้ บูชที่เปลี่ยนได้ ฯลฯ )
ด้วยการกดร้อน กดและการกดเบาที่ใช้สำหรับการเชื่อมต่อถาวรโดยไม่ต้องใช้ตัวยึด ความตึงเครียดเกิดขึ้นในระหว่างกระบวนการประกอบบนพื้นผิวที่จับคู่กัน พวกมันจะสร้างการเปลี่ยนรูปแบบยืดหยุ่นที่ให้ความต้านทานระหว่างการดำเนินการกับการกระจัดของชิ้นส่วนร่วมกัน (ยางเหล็กของล้อรถ, เกียร์ที่อยู่ตรงกลางเพลารถบรรทุก บุชชิ่งในเฟืองหัวเครื่องกลึง ฯลฯ)
ในภาพวาดประเภทของการลงจอดถูกกำหนดตามอัตภาพด้วยตัวอักษรที่เกี่ยวข้องและดัชนีทางด้านขวาซึ่งระบุระดับความแม่นยำเช่นการลงจอดที่ใช้งานง่ายของระดับความแม่นยำที่ 4 ถูกกำหนดให้เป็น L 4
ดังนั้นจึงมีช่องว่างที่เหมาะกับขนาดรู ขนาดใหญ่ขึ้นเพลามีการสอดแทรกซึ่งขนาดของเพลาจะใหญ่กว่าขนาดของรู นอกจากนี้ก็ยังมี ระยะเปลี่ยนผ่านซึ่งสนามความอดทนของรูและเพลาอยู่ในระดับเดียวกันโดยประมาณ. ในกรณีนี้เป็นไปไม่ได้ที่จะพูดล่วงหน้าเกี่ยวกับชิ้นส่วนที่ผลิตโดยใช้แบบเปลี่ยนผ่านว่าจะมีช่องว่างหรือการรบกวนในการเชื่อมต่อ ขึ้นอยู่กับขนาดจริงของชิ้นส่วนที่ประกอบ ตัวอย่างเช่น มีการใช้ชุดเปลี่ยนผ่านเพื่อตั้งศูนย์กลางเพลามอเตอร์ไฟฟ้าด้วยเพลากระปุกเกียร์ความเร็วสูง เมื่อใช้การลงจอดดังกล่าวเพลาจะเชื่อมต่อกับข้อต่อแบบครึ่งเพื่อให้แน่ใจว่าเพลาอยู่ตรงกลาง
ขอแนะนำแนวคิดใหม่ - ส่วนเบี่ยงเบนหลัก. นี้ หนึ่งในสองส่วนเบี่ยงเบน: บนหรือล่าง ซึ่งอยู่ใกล้กว่า เส้นศูนย์และซึ่งกำหนดตำแหน่งของสนามความอดทน. ในรูปที่ 7.2 ฟิลด์ค่าเผื่อของรูหลักจะเป็นค่าเบี่ยงเบน EI ที่ต่ำกว่า เนื่องจากใกล้กับเส้นศูนย์มากกว่า ส่วนเบี่ยงเบนนี้เป็นบวก ส่วนเบี่ยงเบนบนก็จะเป็นบวกเช่นกัน เพราะ มันสูงกว่าส่วนเบี่ยงเบนล่าง ดังนั้นสนามความอดทนของรูจะอยู่เหนือเส้นศูนย์ และขนาดของรูจะใหญ่กว่าขนาดที่ระบุ สำหรับฟิลด์พิกัดความเผื่อของเพลา ค่าเบี่ยงเบนหลักจะเป็นค่าเบี่ยงเบนบน es มันอยู่ใกล้เส้นศูนย์มากขึ้น ความหมายเชิงลบ. ดังนั้นค่าเบี่ยงเบนเพลาด้านล่างจะเป็นลบด้วย และขนาดของเพลาจะเล็กกว่าขนาดที่ระบุ
โดยมีมาตรฐานให้ สองระบบลงจอด: การลงจอดในระบบหลุมและการลงจอดในระบบเพลา. ระบบเหล่านี้มีพื้นฐานอยู่บนแนวคิดเช่น รูหลักและเพลาหลัก. รูหลักถูกกำหนดด้วยตัวอักษร H และเพลาหลักถูกกำหนดด้วยตัวอักษร h สัญญาณของรูหลักคือค่าเบี่ยงเบนที่ต่ำกว่าเป็นศูนย์ เช่น EI H = 0 ค่าเบี่ยงเบนด้านบนของเพลาหลักคือศูนย์ เช่น เอส ชั่วโมง = 0 ดังนั้น ขนาดขั้นต่ำรูหลักและขนาดสูงสุดของเพลาหลักเท่ากับขนาดที่ระบุ
ความพอดีในระบบรูเกิดขึ้นจากการผสมผสานระหว่างค่าความคลาดเคลื่อนของเพลากับค่าความคลาดเคลื่อนของรูหลัก ความพอดีในระบบเพลาเกิดขึ้นจากการผสมผสานระหว่างช่องพิกัดความเผื่อของรูกับช่องพิกัดความเผื่อของเพลาหลัก ในการสร้างฟิลด์ค่าเผื่อ คุณจำเป็นต้องทราบค่าเบี่ยงเบนหลัก (ฐาน) และค่าเผื่อ (เช่น คุณภาพ - ระดับความแม่นยำ) ตัวอย่างเช่น ในรูปที่ 7.2 ค่าเบี่ยงเบนของรูหลักคือค่าเบี่ยงเบนต่ำกว่า EI = 0.1 มม. เส้นที่สอดคล้องกับส่วนเบี่ยงเบนล่างคือขีดจำกัดล่างของฟิลด์ค่าเผื่อ ขอบเขตด้านบนเว้นระยะห่างจากด้านล่างด้วยพิกัดความเผื่อ T D = 0.1 มม. เนื่องจากขีดจำกัดบนต้องไม่ต่ำกว่าขีดจำกัดล่าง เพื่อกำหนดค่าเบี่ยงเบนด้านบนของ ES ของรู คุณต้องสรุป: ES = EI + TD = 0.1 +0.1 = 0.2 มม. สำหรับเพลา ค่าเบี่ยงเบนหลักคือ es = – 0.05 มม. มันเป็นลบ ซึ่งหมายความว่าส่วนเบี่ยงเบนที่ต่ำกว่าจะต้องเป็นลบด้วย หากต้องการระบุค่าเบี่ยงเบนที่ต่ำกว่า ควรลบค่าความคลาดเคลื่อน: ei = es – T d = –0.05 –0.1 = – 0.15 มม. ดังนั้นค่าเบี่ยงเบนหลักจะกำหนดตำแหน่งของโซนความอดทน ดังนั้นมันจึงเป็นพื้นฐาน โปรดจำไว้ว่าตำแหน่งของสนามพิกัดความเผื่อที่สัมพันธ์กับเส้นศูนย์ (เช่น ขนาดที่ระบุ) จะกำหนดขนาดสูงสุดของชิ้นส่วน
รูปที่ 7.3 ประกอบด้วยโครงร่างไดอะแกรมและสัญลักษณ์ ส่วนเบี่ยงเบนพื้นฐานมาตรฐานรู (ด้านบนของแผนภาพ) และเพลา (ด้านล่างของแผนภาพ)
ข้าว. 7.3. แผนผังตำแหน่งและการกำหนดส่วนเบี่ยงเบนหลัก
รูและเพลา
ส่วนเบี่ยงเบนหลักระบุด้วยตัวอักษรละตินจาก A ถึง ZC สำหรับรูจะเป็นอักษรตัวใหญ่ สำหรับเพลา - ตัวพิมพ์เล็ก ลองพิจารณาดู ส่วนบนไดอะแกรม จาก A ถึง H ค่าเบี่ยงเบนหลักคือค่าเบี่ยงเบนต่ำกว่า ซึ่งมากกว่าศูนย์ (EI > 0) เฉพาะสำหรับรูหลัก H เท่านั้นที่จะเท่ากับศูนย์: EI H = 0 ดังนั้น รูที่มีความเบี่ยงเบนเหล่านี้จึงมีขนาดใหญ่กว่า ขนาดและรูปแบบที่กำหนดพร้อมกับเพลาหลัก (es h = 0) ระยะห่างพอดี นอกจากนี้ช่องว่างจะลดลงตามลำดับที่กำหนด
ค่าเบี่ยงเบนหลัก JS อยู่ในฟิลด์พิกัดความเผื่อแบบสมมาตร ซึ่งเท่ากับ ± IT/2 (IT คือพิกัดความเผื่อมาตรฐาน) เช่น ส่วนเบี่ยงเบนบน ES = + IT/2, ส่วนเบี่ยงเบนล่าง EI = – IT/2 การเบี่ยงเบนนี้เป็นขอบเขตระหว่างความเบี่ยงเบนที่ทำให้เกิดระยะห่างที่พอดีกับเพลาหลัก และการเบี่ยงเบนที่ทำให้เกิดความพอดีในช่วงเปลี่ยนผ่าน (จาก JS ถึง N) และพอดีของการแทรกสอด (จาก P ถึง ZC)
ค่าเบี่ยงเบนหลักจาก K ถึง ZC คือค่าเบี่ยงเบนหลักด้านบน ES สำหรับความพอดีในช่วงเปลี่ยนผ่าน สนามพิกัดความเผื่อจะอยู่ที่ประมาณระดับเดียวกับสนามพิกัดความเผื่อของเพลาหลัก เพื่อความพอดีของสัญญาณรบกวน ช่องพิกัดความเผื่อของรูจะอยู่ใต้ช่องพิกัดความเผื่อของเพลาหลัก ดังนั้นขนาดรูจึงเท่ากับ ขนาดที่เล็กกว่าเพลาหลักซึ่งนำไปสู่ความตึงเครียดในการเชื่อมต่อ
แผนภาพด้านล่างในรูปที่ 9 หมายถึงส่วนเบี่ยงเบนของเพลาหลัก ซึ่งสร้างเพลามาตรฐานให้พอดีตั้งแต่ a ถึง zc โดยมีรูหลัก H แผนภาพนี้คือ ภาพสะท้อนแผนภาพด้านบน การเบี่ยงเบนหลักจาก a ถึง h ทำหน้าที่เพื่อสร้างระยะห่างระหว่างกัน ส่วนเบี่ยงเบนจาก js ถึง n - สำหรับความพอดีเฉพาะกาล ส่วนเบี่ยงเบนจาก p ถึง zc - สำหรับความพอดีของการรบกวน
ตารางที่ 7.1 มีค่าตัวเลขสำหรับความคลาดเคลื่อนมาตรฐาน ความคลาดเคลื่อนเหล่านี้ขึ้นอยู่กับขนาดที่ระบุของเพลาและรูตลอดจนคุณภาพด้วย คุณภาพ (ระดับความแม่นยำ) คือชุดของเกณฑ์ความคลาดเคลื่อนที่ถือว่าสอดคล้องกับระดับความแม่นยำเดียวกันสำหรับขนาดที่ระบุทั้งหมด มีคุณวุฒิ 20 ประการในมาตรฐาน เกรดที่แม่นยำที่สุดตั้งแต่ 01 ถึง 5 มีไว้สำหรับคาลิเบอร์เป็นหลัก เช่น สำหรับ เครื่องมือวัดมีไว้สำหรับการควบคุมคุณภาพ คุณสมบัติที่ 6 สอดคล้องกับระดับความแม่นยำสูงสุดในองค์กรการสร้างเครื่องจักร นอกจากนี้เมื่อจำนวนคุณภาพเพิ่มขึ้นระดับความแม่นยำก็จะลดลง
ความคลาดเคลื่อนของคุณสมบัติจะแสดงโดยการรวมกัน ตัวพิมพ์ใหญ่ IT ที่มีคุณสมบัติหมายเลขซีเรียล เช่น IT01, IT6, IT14
ตารางที่ 7.1

ฟิลด์ความอดทนจะถูกระบุด้วยการรวมกันของตัวอักษรของส่วนเบี่ยงเบนหลักและ หมายเลขซีเรียลตัวระบุ เช่น g6, h7, js8, H7, K6, H11 การกำหนดโซนพิกัดความเผื่อจะแสดงหลังขนาดที่ระบุ เช่น 40g6, 40H7, 40H11 นักออกแบบใช้การกำหนดนี้สำหรับพื้นผิวของชิ้นส่วนในภาพวาด
ความพอดีจะถูกระบุด้วยเศษส่วน โดยตัวเศษจะระบุการกำหนดฟิลด์พิกัดความเผื่อของรู และตัวส่วนจะระบุฟิลด์พิกัดความเผื่อของเพลา เช่น H7/g6 การกำหนดความพอดีจะถูกระบุหลังขนาดความพอดีที่ระบุ เช่น 40H7/g6ซึ่งหมายความว่าความพอดีดังกล่าวจะดำเนินการในระบบรู เนื่องจาก ในตัวเศษ สนามความคลาดเคลื่อนของรูหลักในกรณีนี้คือคุณภาพที่ 7 ในตัวส่วนจะมีสนามความอดทนโดยมีค่าเบี่ยงเบนหลัก g ของเกรด 6 ที่แม่นยำยิ่งขึ้น ค่าเบี่ยงเบนพื้นฐานนี้ใช้สำหรับการลงจอดโดยรับประกันการกวาดล้าง นักออกแบบใช้การกำหนดความพอดีที่ระบุบนแบบประกอบสำหรับพื้นผิวที่เชื่อมต่อของชิ้นส่วน
โดยสรุป เราทราบว่าค่าเบี่ยงเบนหลักและพิกัดความเผื่อจะกำหนดตำแหน่งของสนามพิกัดความเผื่อ และด้วยเหตุนี้ ขนาดสูงสุดของรูและเพลา มาตรฐานของรัฐ GOST 25346-89 ประกอบด้วย ค่ามาตรฐานส่วนเบี่ยงเบนหลักที่อยู่ในตารางมาตรฐานที่เกี่ยวข้อง เช่นเดียวกับค่าความคลาดเคลื่อนมาตรฐาน การปฏิบัติตามมาตรฐานเหล่านี้เป็นสิ่งจำเป็นสำหรับทุกคน เฉพาะในกรณีที่สมเหตุสมผลทางเทคนิคเท่านั้นที่อนุญาตให้ใช้ความคลาดเคลื่อนและความพอดีที่ไม่ได้มาตรฐาน
แนวคิดพื้นฐาน.ในการเชื่อมต่อของสองส่วนที่ประกอบเข้าด้วยกัน พื้นผิวของผู้หญิงและผู้ชายจะแตกต่างกัน สิ่งที่พบบ่อยที่สุดในวิศวกรรมเครื่องกลคือการเชื่อมต่อชิ้นส่วนที่มีพื้นผิวทรงกระบอกเรียบ (I) และขนานแบน (II) สำหรับข้อต่อทรงกระบอก พื้นผิวของรูจะครอบคลุมพื้นผิวของเพลา ผิวเคลือบเรียกว่า รูครอบคลุม - เพลา. ชื่อ “รู” และ “เพลา” มักใช้กับพื้นผิวตัวผู้และตัวเมียที่ไม่ใช่ทรงกระบอกอื่นๆ (รูปที่ 115)
ข้าว. 115
ในการเขียนแบบการทำงาน ก่อนอื่นมิติจะถูกวางลงซึ่งใช้ในการหาปริมาณ พารามิเตอร์ทางเรขาคณิตรายละเอียด.
ขนาด- นี่คือค่าตัวเลขของปริมาณเชิงเส้น (เส้นผ่านศูนย์กลาง ความยาว ความสูง ฯลฯ) มิติข้อมูลแบ่งออกเป็นค่าระบุ ค่าจริง และค่าจำกัด
ขนาดที่กำหนด(รูปที่ 116) คือขนาดหลักของชิ้นส่วน คำนวณโดยคำนึงถึงวัตถุประสงค์และความแม่นยำที่ต้องการ ขนาดที่ระบุของการเชื่อมต่อคือขนาดทั่วไป (เท่ากัน) สำหรับรูและเพลาที่ประกอบเป็นการเชื่อมต่อ ขนาดที่ระบุของชิ้นส่วนและการเชื่อมต่อไม่ได้ถูกเลือกโดยพลการ แต่ตาม GOST 6636-69 “ปกติ มิติเชิงเส้น" ในการผลิต ไม่สามารถรักษาขนาดที่ระบุได้: ขนาดจริงจะแตกต่างจากขนาดที่ระบุมากหรือน้อยกว่าเสมอ ดังนั้นนอกเหนือจากขนาดที่ระบุ (คำนวณแล้ว) ขนาดจริงและสูงสุดของชิ้นส่วนยังถูกแยกแยะอีกด้วย

ข้าว. 116
ขนาดจริง - ขนาดที่ได้รับจากการวัดชิ้นส่วนที่เสร็จแล้วโดยมีระดับข้อผิดพลาดที่ยอมรับได้ ความไม่ถูกต้องที่อนุญาตในการผลิตชิ้นส่วนและลักษณะการเชื่อมต่อที่ต้องการนั้นถูกกำหนดโดยขนาดสูงสุด
ขนาดขีดจำกัดคือค่าขอบเขตสองค่าที่อยู่ระหว่างขนาดจริงที่ต้องอยู่ ค่าที่มากกว่าเหล่านี้เรียกว่าขนาดขีด จำกัด ที่ใหญ่ที่สุดยิ่งเล็กลง - ขนาดขีด จำกัด ที่เล็กที่สุด (รูปที่ 117,I) ดังนั้นเพื่อให้แน่ใจว่าสามารถใช้แทนกันได้ในภาพวาดจึงจำเป็นต้องระบุขนาดสูงสุดแทนที่จะเป็นขนาดที่ระบุ แต่นี่จะทำให้ภาพวาดซับซ้อนมาก ดังนั้นจึงเป็นเรื่องปกติที่จะแสดงขนาดสูงสุดในแง่ของการเบี่ยงเบนจากค่าที่ระบุ

ข้าว. 117
ค่าเบี่ยงเบนสูงสุดคือความแตกต่างทางพีชคณิตระหว่างขนาดสูงสุดและขนาดระบุ มีการเบี่ยงเบนขีดจำกัดบนและล่าง ค่าเบี่ยงเบนบนคือความแตกต่างทางพีชคณิตระหว่างขนาดขีดจำกัดที่ใหญ่ที่สุดและขนาดที่ระบุ ตาม GOST 25346-89 ค่าเบี่ยงเบนด้านบนของรูถูกกำหนดให้เป็น ES, เพลา - es ค่าเบี่ยงเบนที่ต่ำกว่าคือความแตกต่างทางพีชคณิตระหว่างขนาดขีดจำกัดที่เล็กที่สุดและขนาดระบุ ส่วนเบี่ยงเบนด้านล่างของรูถูกกำหนดให้เป็น EI, เพลา - ei
ขนาดที่ระบุทำหน้าที่เป็นจุดเริ่มต้นสำหรับการเบี่ยงเบน การเบี่ยงเบนอาจเป็นค่าบวก ลบ และเท่ากับศูนย์ (ดูรูปที่ 117, II) ในตารางมาตรฐาน ส่วนเบี่ยงเบนจะระบุเป็นไมโครมิเตอร์ (μm) ในภาพวาดการเบี่ยงเบนมักจะระบุเป็นหน่วยมิลลิเมตร (มม.)
ส่วนเบี่ยงเบนที่เกิดขึ้นจริง- ความแตกต่างทางพีชคณิตระหว่างขนาดจริงและขนาดระบุ ชิ้นส่วนนั้นถือว่ายอมรับได้หากค่าเบี่ยงเบนที่แท้จริงของขนาดที่ตรวจสอบอยู่ระหว่างค่าเบี่ยงเบนบนและล่าง
ความคลาดเคลื่อน ช่วงพิกัดความเผื่อ มาตรฐานความแม่นยำ. Tolerance T * - ความแตกต่างระหว่างขนาดขีดจำกัดที่ใหญ่ที่สุดและเล็กที่สุด หรือค่าสัมบูรณ์ของความแตกต่างพีชคณิตระหว่างส่วนเบี่ยงเบนบนและล่าง
มาตรฐาน GOST 25346-89 กำหนดแนวคิดของ "ความอดทนของระบบ" - นี่คือความอดทนมาตรฐาน ติดตั้งโดยระบบความคลาดเคลื่อนและการลงจอด ความคลาดเคลื่อนของระบบ ESDP** ได้รับการกำหนด: IT01, ITO; IT1 ... IT17 ตัวอักษร IT ระบุว่า “ความทนทานต่อ ISO” *** ดังนั้น IT7 จึงหมายถึงการอนุมัติตามคุณสมบัติ ISO ครั้งที่ 7
ค่าความคลาดเคลื่อนไม่ได้บ่งบอกถึงความแม่นยำในการประมวลผลอย่างสมบูรณ์ เช่นที่เพลา? 8 _0.03 มม. และเพลา 64_0.03 มม. ค่าความคลาดเคลื่อนเท่ากันและเท่ากับ 0.03 แต่การประมวลผลเพลา 64_0.03 มม. จะยากกว่าเพลา 8_0.03 มม. มาก
หน่วยความคลาดเคลื่อน i (I) ถูกตั้งค่าเป็นหน่วยความแม่นยำซึ่งจะแสดงการพึ่งพาความแม่นยำกับเส้นผ่านศูนย์กลาง d ยิ่งมีหน่วยพิกัดความเผื่ออยู่ในพิกัดความเผื่อของระบบมากขึ้น พิกัดความเผื่อจะมากขึ้น ความแม่นยำก็จะยิ่งต่ำลง และในทางกลับกัน จำนวนหน่วยความคลาดเคลื่อนที่มีอยู่ในเกณฑ์ความคลาดเคลื่อนของระบบจะถูกกำหนดโดยระดับความแม่นยำ
ภายใต้ คุณภาพหมายถึงชุดของพิกัดความเผื่อที่แตกต่างกันไปขึ้นอยู่กับขนาดที่ระบุ คุณภาพครอบคลุมความคลาดเคลื่อนของชิ้นส่วนผสมพันธุ์และไม่ผสมพันธุ์ สำหรับการปันส่วน ระดับที่แตกต่างกันความแม่นยำของมิติตั้งแต่ 1 มม. ถึง 500 มม. ในระบบ ESDP มีคุณสมบัติ 19 ประการ: 01; 0; 1; 2 ... 17.
ปัจจุบันความคลาดเคลื่อนของเครื่องมือวัดและอุปกรณ์คือ IT01 - IT7 ความคลาดเคลื่อนของขนาดที่พอดีคือ IT3 ... IT13 ความคลาดเคลื่อนของขนาดและขนาดที่ไม่สำคัญในการเชื่อมต่อแบบหยาบคือ IT14 ... IT17 สำหรับแต่ละคุณสมบัติ ขึ้นอยู่กับหน่วยพิกัดความเผื่อและจำนวนหน่วยพิกัดความเผื่อ ชุดของฟิลด์พิกัดความเผื่อจะถูกสร้างขึ้นตามธรรมชาติ
ฟิลด์ค่าเผื่อ - ฟิลด์ที่ถูกจำกัดโดยการเบี่ยงเบนบนและล่าง ถูกกำหนดโดยขนาดของพิกัดความเผื่อและตำแหน่งที่สัมพันธ์กับขนาดที่ระบุ ที่ การแสดงกราฟิก(รูปที่ 118) ฟิลด์พิกัดความเผื่ออยู่ระหว่างเส้นสองเส้นที่สอดคล้องกับค่าเบี่ยงเบนด้านบนและด้านล่างสัมพันธ์กับเส้นศูนย์

ข้าว. 118
ช่องพิกัดความเผื่อทั้งหมดสำหรับรูและเพลาจะแสดงด้วยตัวอักษรละติน: สำหรับรู (I) - ตัวพิมพ์ใหญ่ (A, B, C, B ฯลฯ) และสำหรับเพลา (II) - ตัวพิมพ์เล็ก (a, b, c, ง และอื่นๆ) ฟิลด์ค่าเผื่อจำนวนหนึ่งระบุด้วยตัวอักษรสองตัว และ ตัวอักษร O, W, Q และ L ไม่ได้ใช้
ตอนนี้เรามาดูสาระสำคัญของแนวคิดบางประการกัน สมมติว่าสำหรับบางส่วน ขนาดการออกแบบหลักตั้งไว้ที่ 25 มม. นี่คือขนาดที่ระบุ เนื่องจากความไม่ถูกต้องในการประมวลผล ขนาดที่แท้จริงของชิ้นส่วนอาจมีขนาดใหญ่กว่าหรือเล็กกว่าขนาดที่ระบุ อย่างไรก็ตาม ขนาดจริงควรแตกต่างกันภายในขีดจำกัดที่กำหนดเท่านั้น ตัวอย่างเช่น ให้ขนาดขีดจำกัดที่ใหญ่ที่สุดคือ 25.028 มม. และขนาดขีดจำกัดที่เล็กที่สุดคือ 24.728 มม. ซึ่งหมายความว่าค่าเผื่อขนาดซึ่งระบุถึงความแม่นยำในการประมวลผลที่ต้องการของชิ้นส่วนคือ 25.028-24.728 = 0.300 มม.
ตามที่ระบุไว้แล้วภาพวาดไม่ได้ระบุขนาดสูงสุด แต่เป็นขนาดที่ระบุและการเบี่ยงเบนที่อนุญาต - บนและล่าง สำหรับส่วนที่พิจารณา ค่าเบี่ยงเบนขีดจำกัดบนจะเท่ากับ: 25.028-25 = 0.028 มม. ค่าเบี่ยงเบนขีดจำกัดล่าง: 24.728-25=0.272 มม. ขนาดของชิ้นส่วนที่ระบุในภาพวาด - ส่วนเบี่ยงเบนขีด จำกัด ด้านบนของขนาดเขียนไว้เหนือส่วนล่าง ค่าเบี่ยงเบนจะเขียนด้วยแบบอักษรที่เล็กกว่าขนาดที่ระบุ เครื่องหมายบวกและลบบ่งบอกว่าต้องดำเนินการอย่างไรเพื่อคำนวณขีดจำกัดขนาดที่ใหญ่ที่สุดและเล็กที่สุด
หากค่าเบี่ยงเบนขีดจำกัดล่างและบนเท่ากัน จะถูกเขียนดังนี้:
ในกรณีนี้ขนาดตัวอักษรของขนาดที่ระบุและค่าเบี่ยงเบนสัมบูรณ์ที่เท่ากันจะเท่ากัน หากค่าเบี่ยงเบนค่าใดค่าหนึ่งเป็นศูนย์ แสดงว่าค่าดังกล่าวไม่ได้ระบุไว้เลย ในกรณีนี้ ค่าเบี่ยงเบนบวกจะใช้แทนขีดจำกัดบน และค่าลบจะใช้แทนค่าเบี่ยงเบนขีดจำกัดล่าง
* จดหมายเริ่มต้น คำภาษาฝรั่งเศสความอดทน - ความอดทน
**ระบบการรับเข้าและลงจอดแบบครบวงจร (USDP)
***องค์การระหว่างประเทศเพื่อการมาตรฐาน (ISO) ซึ่งมีข้อเสนอแนะเป็นพื้นฐานของ ESDP