PWM หรือ PWM (การปรับความกว้างพัลส์ในภาษาอังกฤษ) เป็นวิธีหนึ่งในการควบคุมการจ่ายพลังงานให้กับโหลด การควบคุมประกอบด้วยการเปลี่ยนระยะเวลาพัลส์ที่อัตราการเกิดซ้ำของพัลส์คงที่ การมอดูเลตความกว้างพัลส์อาจเป็นแอนะล็อก ดิจิตอล ไบนารี หรือไตรภาค
แอปพลิเคชัน การมอดูเลตความกว้างพัลส์ช่วยให้คุณเพิ่มประสิทธิภาพของตัวแปลงไฟฟ้าโดยเฉพาะตัวแปลงพัลส์ซึ่งปัจจุบันเป็นพื้นฐานของแหล่งจ่ายไฟสำรองสำหรับอุปกรณ์อิเล็กทรอนิกส์ต่างๆ ฟลายแบ็คและจังหวะเดินหน้า จังหวะเดียว พุชพูล และฮาล์ฟบริดจ์ รวมถึงบริดจ์ ตัวแปลงพัลส์ได้รับการควบคุมในปัจจุบันด้วยการมีส่วนร่วมของ PWM ซึ่งใช้กับตัวแปลงเรโซแนนซ์ด้วย
การปรับความกว้างพัลส์ช่วยให้คุณปรับความสว่างของแสงพื้นหลังของจอแสดงผลคริสตัลเหลว โทรศัพท์มือถือ,สมาร์ทโฟน,แล็ปท็อป PWM ถูกนำมาใช้ในอินเวอร์เตอร์รถยนต์เครื่องชาร์จ ฯลฯ ใดก็ได้ ที่ชาร์จวันนี้เขาใช้ PWM ในการทำงานของเขา
เนื่องจากองค์ประกอบการสลับในตัวแปลงความถี่สูงสมัยใหม่จึงมีการใช้ทรานซิสเตอร์แบบไบโพลาร์และเอฟเฟกต์สนาม โหมดคีย์. ซึ่งหมายความว่าส่วนหนึ่งของคาบที่ทรานซิสเตอร์เปิดสนิท และส่วนหนึ่งของคาบปิดสนิท
และเนื่องจากในสถานะชั่วคราวที่กินเวลาเพียงสิบนาโนวินาที พลังงานที่ปล่อยออกมาบนสวิตช์จึงมีน้อยเมื่อเทียบกับพลังงานที่มีสวิตช์ ดังนั้นพลังงานเฉลี่ยที่ปล่อยออกมาในรูปของความร้อนบนสวิตช์จึงกลายเป็นไม่มีนัยสำคัญในท้ายที่สุด ในกรณีนี้ในสถานะปิดความต้านทานของทรานซิสเตอร์ในฐานะสวิตช์มีขนาดเล็กมากและแรงดันไฟฟ้าตกคร่อมจะเข้าใกล้ศูนย์
ในสถานะเปิด ค่าการนำไฟฟ้าของทรานซิสเตอร์ใกล้กับศูนย์และในทางปฏิบัติแล้วไม่มีกระแสไฟฟ้าไหลผ่าน สิ่งนี้ช่วยให้คุณสร้างตัวแปลงขนาดกะทัดรัดด้วย ประสิทธิภาพสูงนั่นคือมีการสูญเสียความร้อนเล็กน้อย และตัวแปลงเรโซแนนซ์ที่มีการสลับที่ ZCS กระแสเป็นศูนย์ (การสลับกระแสเป็นศูนย์) ทำให้สามารถลดการสูญเสียเหล่านี้ให้เหลือน้อยที่สุด
ในเครื่องกำเนิดไฟฟ้า PWM ชนิดแอนะล็อก สัญญาณควบคุมถูกสร้างขึ้นโดยตัวเปรียบเทียบแอนะล็อก ตัวอย่างเช่น เมื่อสัญญาณรูปสามเหลี่ยมหรือฟันเลื่อยถูกจ่ายให้กับอินพุทแบบกลับตัวของตัวเปรียบเทียบ และสัญญาณต่อเนื่องแบบมอดูเลตถูกจ่ายให้กับอินพุทที่ไม่กลับด้าน
พัลส์เอาท์พุตเป็นรูปสี่เหลี่ยมผืนผ้า ความถี่การทำซ้ำจะเท่ากับความถี่ของเลื่อย (หรือสัญญาณรูปสามเหลี่ยม) และระยะเวลาของส่วนที่เป็นบวกของพัลส์สัมพันธ์กับเวลาที่ระดับของสัญญาณคงที่มอดูเลตที่จ่ายให้กับ อินพุทที่ไม่กลับด้านของตัวเปรียบเทียบจะสูงกว่าระดับของสัญญาณเลื่อย ซึ่งจ่ายให้กับอินพุทกลับด้าน เมื่อแรงดันเลื่อยสูงกว่าสัญญาณมอดูเลต เอาต์พุตจะมีส่วนลบของพัลส์
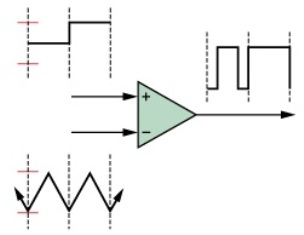
หากเลื่อยถูกป้อนไปยังอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ และสัญญาณมอดูเลตถูกป้อนไปที่อินพุตที่กลับด้าน จากนั้นพัลส์เอาต์พุตจะ รูปร่างสี่เหลี่ยมจะมี ค่าบวกเมื่อแรงดันไฟฟ้าของเลื่อยสูงกว่าค่าของสัญญาณมอดูเลตที่จ่ายให้กับอินพุทแบบกลับด้าน และค่าลบ - เมื่อแรงดันไฟฟ้าของเลื่อยต่ำกว่าสัญญาณมอดูเลต ตัวอย่างของการสร้าง PWM แบบอะนาล็อกคือไมโครวงจร TL494 ซึ่งใช้กันอย่างแพร่หลายในปัจจุบันในการสร้างแหล่งจ่ายไฟแบบสวิตชิ่ง
Digital PWM ใช้ในเทคโนโลยีดิจิทัลไบนารี พัลส์เอาท์พุตยังรับเพียงหนึ่งในสองค่า (เปิดหรือปิด) และระดับเอาท์พุตเฉลี่ยจะเข้าใกล้ระดับที่ต้องการ ที่นี่รับสัญญาณฟันเลื่อยได้โดยใช้ตัวนับ N-bit
อุปกรณ์ดิจิตอลที่มี PWM ยังทำงานที่ความถี่คงที่ซึ่งเกินเวลาตอบสนองของอุปกรณ์ควบคุมอย่างมาก วิธีการนี้เรียกว่าการสุ่มตัวอย่างเกิน ระหว่างขอบนาฬิกา เอาต์พุต PWM แบบดิจิทัลยังคงมีเสถียรภาพ ไม่ว่าจะสูงหรือต่ำ ขึ้นอยู่กับสถานะปัจจุบันของเอาต์พุตของตัวเปรียบเทียบดิจิทัล ซึ่งจะเปรียบเทียบระดับสัญญาณที่ตัวนับและสัญญาณดิจิทัลโดยประมาณ
เอาต์พุตจะถูกโอเวอร์คล็อกตามลำดับของพัลส์ที่มีสถานะ 1 และ 0 แต่ละสถานะของนาฬิกาอาจเปลี่ยนแปลงไปในทางตรงกันข้ามหรือไม่ก็ได้ ความถี่ของพัลส์จะแปรผันตามระดับของสัญญาณที่กำลังเข้ามา และหน่วยที่อยู่ถัดจากกันสามารถสร้างพัลส์ที่กว้างและยาวขึ้นได้
พัลส์ผลลัพธ์ที่มีความกว้างแปรผันจะเป็นผลคูณของคาบสัญญาณนาฬิกา และความถี่จะเท่ากับ 1/2NT โดยที่ T คือคาบนาฬิกา N คือจำนวนรอบสัญญาณนาฬิกา สามารถทำได้มากขึ้นที่นี่ ความถี่ต่ำสัมพันธ์กับความถี่สัญญาณนาฬิกา วงจรการสร้างดิจิทัลที่อธิบายไว้คือ PWM หนึ่งบิตหรือสองระดับ การมอดูเลต PCM แบบเข้ารหัสพัลส์
การมอดูเลตที่ใช้รหัสพัลส์สองระดับนี้โดยพื้นฐานแล้วคือชุดของพัลส์ที่มีความถี่ 1/T และความกว้างเป็น T หรือ 0 การสุ่มตัวอย่างเกินจะใช้เพื่อหาค่าเฉลี่ยในช่วงเวลาที่มากขึ้น คุณภาพสูง PWM สามารถทำได้โดยการมอดูเลตความหนาแน่นของพัลส์หนึ่งบิต หรือที่เรียกว่าการมอดูเลตความถี่พัลส์
ด้วยการมอดูเลตความกว้างพัลส์แบบดิจิทัล พัลส์ย่อยรูปสี่เหลี่ยมผืนผ้าที่เติมเต็มคาบสามารถตกที่ตำแหน่งใดก็ได้ในช่วงเวลานั้น และจากนั้นเฉพาะตัวเลขเท่านั้นที่ส่งผลต่อค่าเฉลี่ยของสัญญาณในช่วงเวลานั้น ดังนั้นหากคุณแบ่งช่วงเวลาออกเป็น 8 ส่วนการรวมกันของพัลส์ 11001100, 11110000, 11000101, 10101010 เป็นต้น จะให้ค่าเฉลี่ยเท่ากันสำหรับช่วงเวลานั้น อย่างไรก็ตาม หน่วยที่แยกจากกันทำให้โหมดการทำงานยากขึ้น ทรานซิสเตอร์ที่สำคัญ.
ผู้ทรงคุณวุฒิด้านอิเล็กทรอนิกส์ที่พูดถึง PWM ให้การเปรียบเทียบกับกลไกดังต่อไปนี้ หากคุณใช้เครื่องยนต์เพื่อหมุนมู่เล่ที่มีน้ำหนักมาก เนื่องจากเครื่องยนต์สามารถเปิดหรือปิดได้ มู่เล่จะหมุนและหมุนต่อไป หรือจะหยุดเนื่องจากการเสียดสีเมื่อดับเครื่องยนต์
แต่ถ้าเครื่องยนต์เปิดอยู่สองสามวินาทีต่อนาที การหมุนของมู่เล่จะคงอยู่ตามความเร็วที่แน่นอนเนื่องจากความเฉื่อย และยิ่งเปิดเครื่องยนต์นานขึ้น ความเร็วมู่เล่จะหมุนก็จะยิ่งสูงขึ้นเท่านั้น เช่นเดียวกับ PWM สัญญาณเปิดและปิด (0 และ 1) มาที่เอาต์พุต และด้วยเหตุนี้ จึงได้ค่าเฉลี่ย ด้วยการรวมแรงดันพัลส์เมื่อเวลาผ่านไป เราจะได้พื้นที่ใต้พัลส์ และผลกระทบต่อร่างกายการทำงานจะเหมือนกันกับการทำงานที่ค่าแรงดันไฟฟ้าเฉลี่ย
นี่คือวิธีการทำงานของตัวแปลง โดยที่การสลับเกิดขึ้นหลายพันครั้งต่อวินาที และความถี่สูงถึงหลายเมกะเฮิรตซ์ ตัวควบคุม PWM พิเศษที่ใช้ในการควบคุมบัลลาสต์แพร่หลาย หลอดประหยัดไฟ, อุปกรณ์จ่ายไฟ ฯลฯ
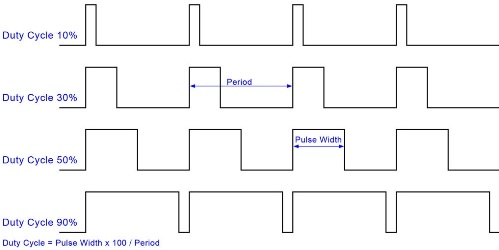
อัตราส่วนของระยะเวลารวมของช่วงพัลส์ต่อเวลาเปิดเครื่อง (ส่วนที่เป็นบวกของพัลส์) เรียกว่ารอบการทำงานของพัลส์ ดังนั้นหากเวลาเปิดเครื่องคือ 10 μs และช่วงเวลาคงอยู่ 100 μs ดังนั้นที่ความถี่ 10 kHz รอบการทำงานจะเท่ากับ 10 และเขียนว่า S = 10 เรียกว่ารอบหน้าที่ผกผัน รอบหน้าที่ของพัลส์ ในภาษาอังกฤษ Duty Cycle หรือเรียกโดยย่อว่า DC
ตามตัวอย่างที่กำหนด DC = 0.1 เนื่องจาก 10/100 = 0.1 ด้วยการมอดูเลตความกว้างพัลส์ โดยการปรับรอบการทำงานของพัลส์ กล่าวคือ โดยการเปลี่ยนแปลง DC เพื่อให้ได้ค่าเฉลี่ยที่ต้องการที่เอาต์พุตของอิเล็กทรอนิกส์หรืออุปกรณ์อื่นๆ อุปกรณ์ไฟฟ้าเช่น เครื่องยนต์
บางครั้งในวิทยุสมัครเล่น คุณต้องมีเครื่องกำเนิดไฟฟ้าที่มีรอบการทำงานแบบแปรผัน (CV) สำหรับการทดสอบ แผนงานต่างๆ, ระยะเอาท์พุตกำลังของ SMPS เป็นต้น และยังต้องตรวจสอบชิป PWM อีกด้วย
เครื่องกำเนิดไฟฟ้าประกอบโดยใช้ PWM UC3843 ทั่วไปจาก Unitrode หรือที่คล้ายกัน
เพื่อเพิ่มความน่าเชื่อถือของแหล่งจ่ายไฟที่อินพุตจึงคุ้มค่า โคลงหนึ่ง LM7812 เนื่องจากกระแสที่ใช้โดยตรงจากเครื่องกำเนิดไฟฟ้าเอง (ไม่มีโหลด) ไม่เกิน 25..30mA ฉันจึงใช้โคลง TO92ผลงาน.
ไดโอด D1การป้องกันจากคนโง่ (หรือเพียงแค่ไม่ตั้งใจ)
ตัวต้านทาน R5จำกัดกระแสไฟขาออก ปกป้องชิปในกรณี ไฟฟ้าลัดวงจรออก ตัวต้านทาน R1จำกัดความถี่สูงสุดและตั้งเวลาร่วมกับตัวเก็บประจุ ค1. ตัวเก็บประจุ ค4, C5บายพาสแหล่งจ่ายไฟไปยังโคลง ค3แหล่งจ่ายไฟแบบ PWM และตัวเก็บประจุ ค2กรองแรงดันเอาต์พุตของแหล่งจ่ายแรงดันอ้างอิง ซึ่งควรอยู่ที่ประมาณ 5 โวลต์หากชิปทำงานปกติ
ต่อไปเป็นตัวแปร:
อาร์วี1(50 kOhm) - เป็นส่วนหนึ่งของไทม์มิ่ง RC chain และควบคุมความถี่ของเครื่องกำเนิดไฟฟ้าตามลำดับ ในตำแหน่งด้านบนความถี่จะน้อยที่สุด
อาร์วี2(5 kOhm) - ปรับปัจจัยการเติมของเครื่องกำเนิดไฟฟ้า (ลัดวงจร, รอบการทำงาน)
อาร์วี3(1 kOhm) - ช่วยให้คุณปรับจุดการทำงานของวงจรได้แม่นยำยิ่งขึ้น ข้อเสนอแนะเพื่อให้ผู้ควบคุมดูแล อาร์วี2ทำให้สามารถปรับการลัดวงจรจากต่ำสุดไปสูงสุดได้
การออกแบบไม่จำเป็นต้องมีการปรับเปลี่ยน และเริ่มทำงานได้ทันทีด้วยชิ้นส่วนที่สามารถซ่อมแซมได้และการติดตั้งที่ถูกต้อง ชนชั้นกลาง 2N2222 สามารถถูกแทนที่ด้วย KT3102 ของเราหรืออันอื่นที่คล้ายกัน ตัวเก็บประจุ ค2, ค3, ค4และ C5ไม่จำเป็นต่อการทำงานของวงจรอีกด้วย R5.
ด้วยพิกัดที่ระบุในแผนภาพ ความถี่ของเครื่องกำเนิดไฟฟ้าสามารถปรับได้ตั้งแต่ประมาณ 16.9 kHz ถึง 250 kHz ใกล้กับความถี่สูงสุดมากขึ้น ขอบจะแบนเล็กน้อยและประมาณ 0.2 μsec รอบการทำงานสูงสุดถูกจำกัดไว้ที่ประมาณ 90%
วงจรทำงานในช่วงตั้งแต่ 12 ถึง 30V หากคุณถอดโคลงออก ขีด จำกัด ล่างจะขยายเป็น 9V แต่จะเป็นอันตรายต่อโครงสร้างด้วยแรงดันไฟฟ้าที่สูงกว่า 20V: ตามที่แสดงในทางปฏิบัติที่กำลังไฟ 30V จ่าย UC3843 แตกเป็นชิ้น ๆ พยายามเข้าตาหรือใบหน้า ฉันออกแบบบนไฟเบอร์กลาสด้านเดียวหนา 1.5 มม. โดยใช้ LUT ขนาดบอร์ด 30x37 มม. ไม่มีจัมเปอร์
หลังจากแยกส่วนประกอบและล้างฟลักซ์ออกแล้ว ฉันแนะนำให้ปิดรางด้านข้างด้วยน้ำยาวานิชซาปอน
ฉันใช้ทั้งส่วนประกอบ smd และคลาสสิก ผู้ที่ต้องการสามารถเปลี่ยนสายไฟได้ตามสะดวกสำหรับพวกเขา
ใส่ไมโครวงจรเข้าไปในซ็อกเก็ต DIP8 ซึ่งช่วยให้คุณตรวจสอบไมโครวงจรโดยไม่ต้องบัดกรีอะไรเลย สามารถดาวน์โหลดบอร์ดรูปแบบเลย์สำหรับ Sprint Layout ได้ที่นี่
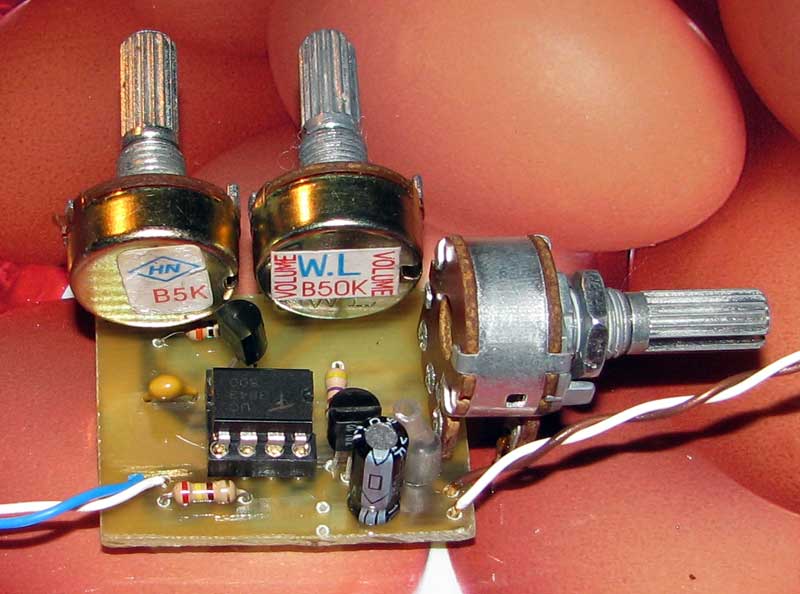
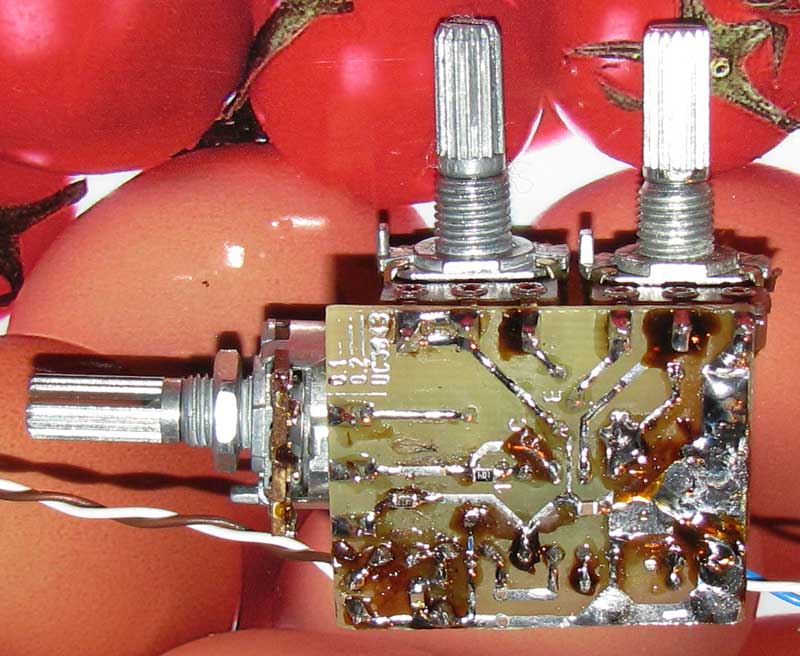
นี่คือสิ่งที่ดูเหมือน:
รุ่น พีเอ็มดับเบิลยูที่ เอสทีเอ็ม32ดำเนินการโดยใช้ตัวจับเวลามีการเขียนมากมายเกี่ยวกับพวกเขาในเอกสารประกอบ แต่การตั้งค่า PWM นั้นค่อนข้างง่าย สร้าง พีเอ็มดับเบิลยูเราจะไปด้วยความช่วยเหลือ ช่องที่4จับเวลาครั้งแรก
ก่อนอื่นคุณต้องค้นหาว่าพินใดที่รับผิดชอบช่องที่ 4 ของตัวจับเวลาครั้งแรกสำหรับสิ่งนี้ที่เราเปิดขึ้น เอกสารข้อมูลทางเทคนิคถึง MK ของฉัน ฉันมี STM32F103VET6และค้นหาฟังก์ชันทางเลือกที่มีเอาต์พุตเป็น TIM1_CH4.
หากต้องการใช้ตัวจับเวลา จะต้องกำหนดค่าเอาต์พุตเป็นแบบพุชพูล

มาดูทะเบียนที่เราต้องการกัน
TIMx_PSC– พรีสเกลเลอร์ความถี่อินพุต สามารถคำนวณค่าได้โดยใช้สูตร
F = fCK_PSC / (PSC + 1)
- เอฟ– ความถี่ที่ใช้ในการโอเวอร์คล็อกตัวจับเวลา
- fCK_PSC- ความถี่จับเวลาเพื่อแบ่ง
- พี.เอส.ซี.- ค่าลงทะเบียน PSC
TIMx_CCRy[x– หมายเลขตัวจับเวลา ย– หมายเลขช่อง] – กำหนดรอบการทำงานของ PWM คือถ้าเข้า. เออาร์อาร์เราจะเขียน 1,000 และใน CCRy 300 จากนั้นรอบการทำงานที่มีระดับแอคทีฟเป็นบวกและไดเร็กต์ พีเอ็มดับเบิลยูจะเท่ากับ 0.3 หรือ 30%
TIMx_CNT– รีจิสเตอร์การนับ 16 บิต เปลี่ยนค่าเป็น ±1 เมื่อมาถึงของแต่ละพัลส์ ขึ้นอยู่กับทิศทางของการนับ
TIMx_CR1 ->DIR– การลงทะเบียนทิศทางการนับ เมื่อตั้งค่าเป็น “0” เครื่องนับจะนับขึ้น เมื่อตั้งค่าเป็น “1” - ลง เมื่อตัวนับถูกกำหนดค่าในโหมดจัดกึ่งกลาง บิตจะเป็นแบบอ่านอย่างเดียว
TIMx_CCER->CCyE[x– หมายเลขตัวจับเวลา ย– หมายเลขช่อง] – การตั้งค่า “1” เป็นบิตนี้จะทำให้ช่องตัวจับเวลาที่เกี่ยวข้องสามารถใช้เป็นเอาต์พุตได้ รวมถึงสำหรับการสร้าง PWM
TIMx_BDTR->กระทรวงศึกษาธิการ– การตั้งค่าบิตนี้เป็นหนึ่งทำให้สามารถใช้พินตัวจับเวลาเป็นเอาต์พุตได้
บิต โอซี่เอ็ม, ที่ไหน ย- หมายเลขช่องในทะเบียน TIMx_CCMRอนุญาตให้คุณเลือกโหมด PWM ตรงหรือผกผัน

ต้องบอกว่าช่องแรกและช่องที่สองได้รับการกำหนดค่าในการลงทะเบียน CCMR1และตัวที่สามและสี่ในทะเบียน CCMR2.
TIMx_CCER->CCyP[x- หมายเลขตัวจับเวลา ย- หมายเลขช่อง] - บิตนี้ให้คุณเลือกระดับที่ใช้งานอยู่ "0" - สูง "1" - ต่ำ
TIMx_CR1 ->CMS- ให้คุณเลือกโหมดการจัดตำแหน่งด้านหน้าหรือตรงกลางซึ่งคล้ายกัน PWM ที่รวดเร็วและ เฟสที่ถูกต้อง PWMที่ เอวีอาร์.
- 00: โหมดจัดตำแหน่งด้านหน้า ตัวนับนับขึ้นหรือลงขึ้นอยู่กับบิตทิศทาง (DIR)
- 01: โหมดการจัดกึ่งกลาง 1. ตัวนับนับขึ้นและลง ค่าสถานะการขัดจังหวะถูกตั้งค่าจากช่องที่กำหนดค่าสำหรับเอาต์พุต (CCxS=00 ใน TIMx_CCMRx) เฉพาะเมื่อตัวนับนับถอยหลังเท่านั้น
- 10: โหมด 2 การจัดตำแหน่งกึ่งกลาง ตัวนับนับขึ้นและลง ค่าสถานะการขัดจังหวะถูกตั้งค่าจากช่องสัญญาณที่กำหนดค่าสำหรับเอาต์พุต (CCxS=00 ใน TIMx_CCMRx) เฉพาะเมื่อมีการนับตัวนับเท่านั้น
- 11: โหมด 3 การจัดตำแหน่งกึ่งกลาง ตัวนับนับขึ้นและลง ค่าสถานะขัดจังหวะถูกตั้งค่าจากช่องที่กำหนดค่าสำหรับเอาต์พุต (CCxS=00 ใน TIMx_CCMRx) เมื่อตัวนับนับขึ้นและลง
มาเขียนโค้ดเพื่อสร้างกัน พีเอ็มดับเบิลยูด้วยการจัดตำแหน่งด้านหน้า
#include "stm32f10x.h" int main (เป็นโมฆะ) ( // นาฬิกา GPIOA, TIM1, ฟังก์ชั่นพอร์ตทางเลือก RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_TIM1EN | RCC_APB2ENR_AFIOEN; // PA11 push-pull GPIOA->CRH &= ~GPIO_CRH_CNF11; GPIOA->CRH |= GPIO_CRH_CNF11_1; GPIOA->CRH &= ~GPIO_CRH_MODE11; GPIOA->CRH |= GPIO_CRH_MODE11_1; GPIOA->CRH |= GPIO_CRH_MODE11_1; //TIM1->ตัวแบ่ง PSC = 72; //TIM1->ค่ารีเซ็ต ARR = 1,000; // ปัจจัยหน้าที่ TIM1->CCR4 = 300; // ตั้งค่าช่อง 4 เป็นเอาต์พุต, ระดับแอคทีฟต่ำ TIM1->CCER |= TIM_CCER_CC4E | TIM_CCER_CC4P; // อนุญาตให้ใช้พินตัวจับเวลาเป็นเอาต์พุต TIM1-> BDTR | = TIM_BDTR_MOE; // โหมด PWM 1, ช่องสัญญาณ PWM โดยตรง 4 TIM1->CCMR2 = TIM_CCMR2_OC4M_2 | TIM_CCMR2_OC4M_1; // หากคุณต้องการกำหนดค่าช่องแรกคุณสามารถทำได้เช่นนี้ //TIM1->CCMR1 = TIM_CCMR1_OC1M_2 | TIM_CCMR1_OC1M_1 ; //นับ TIM1 ->CR1 &= ~TIM_CR1_DIR; //การจัดตำแหน่งขอบ, Fast PWM TIM1->CR1 &= ~TIM_CR1_CMS; //เปิดตัวนับ TIM1->CR1 |= TIM_CR1_CEN; )
มาดูกันว่าเกิดอะไรขึ้น
เครื่องกำเนิดสัญญาณความกว้างพัลส์ที่ง่ายที่สุด
วัตถุประสงค์หลักของโปรแกรม PWM Generator คือการสร้างสัญญาณการมอดูเลตความกว้างพัลส์แบบเรียลไทม์ โทนเสียงเหล่านี้สร้างขึ้นตามค่าความถี่ที่ระบุ (เป็นเฮิรตซ์) รอบการทำงาน - อัตราส่วนของเวลาระหว่างสถานะต่ำและสูงของสัญญาณ (เป็นเปอร์เซ็นต์) และแอมพลิจูด - ระดับของสัญญาณดิจิตอล (ในหน่วย dBFS) . พารามิเตอร์ข้างต้นทั้งหมดสามารถเปลี่ยนแปลงได้ทันทีระหว่างการทำงาน ระดับสูงสุดที่เป็นไปได้ของสัญญาณที่สร้างขึ้นคือ 0 dBFS และระดับสูงสุด ความถี่สูงคือครึ่งหนึ่งของความถี่สุ่มตัวอย่าง เพื่อกำหนดค่าการสร้างเสียง ระดับที่เหมาะสมที่สุดคุณภาพมีเมนูคุณสมบัติเอาต์พุตทั้งหมด มีความสามารถในการเปลี่ยนจำนวนและขนาดของบัฟเฟอร์ข้อมูลภายใน ความถี่ในการสุ่มตัวอย่าง และการหาปริมาณ
ซอฟต์แวร์นี้สามารถใช้เพื่อสร้างโทนเสียงควบคุมสำหรับอุปกรณ์ไฟฟ้าและเครื่องกลไฟฟ้าต่างๆ โดยเฉพาะสัญญาณ PWM ที่ได้มาจากเอาต์พุตของการ์ดเสียง คอมพิวเตอร์ส่วนบุคคลและผ่านเครื่องขยายเสียงมาตรฐาน ใช้ในการควบคุมมอเตอร์ พัดลม และอุปกรณ์ไฟส่องสว่าง
เครื่องกำเนิดสัญญาณ PWM รองรับการทำงานกับการ์ดเสียงหลายตัว และคุณสามารถเลือกการ์ดเสียงที่จะใช้ส่งสัญญาณที่ต้องการได้ (โดยค่าเริ่มต้น โปรแกรมจะทำงานร่วมกับอุปกรณ์ส่งออกที่ระบุในแผงควบคุม Windows) เป็นที่น่าสังเกตว่าสัญญาณ PWM ที่ใช้งานได้สามารถบันทึกเป็นไฟล์ WAV และฟังโดยใช้มาตรฐานในภายหลังได้ ซอฟต์แวร์. และหากคุณใช้โทนเสียงบางอย่างเป็นประจำ เครื่องกำเนิดสัญญาณ PWM จะทำให้สามารถบันทึก (และโหลด) โทนเสียงเหล่านั้นเป็นค่าที่ตั้งไว้ล่วงหน้าได้ นอกจากนี้ ยังมีการตั้งค่าล่วงหน้าหลายรายการมาพร้อมกับแอปอีกด้วย
PWM Generator รองรับตัวเลือกในการซิงโครไนซ์อินสแตนซ์ที่ทำงานอยู่ทั้งหมดของโปรแกรม ช่วยให้คุณสร้างหลายโทนเสียงได้ในคราวเดียว ควรสังเกตว่าซอฟต์แวร์สามารถทำงานได้ พื้นหลังทำให้ผู้ใช้สามารถเปลี่ยนความสนใจไปที่แอพพลิเคชั่นอื่นได้ นอกจากนี้ สามารถควบคุมเครื่องกำเนิดสัญญาณ PWM ได้โดยใช้คำสั่งสคริปต์ รวมถึงผ่านระบบ Windows Messaging
ผู้เขียนรายงานว่ายิ่งเวิร์กสเตชันเร็วขึ้น คุณภาพเสียงและการตอบสนองของส่วนควบคุมก็จะยิ่งสูงขึ้นเมื่อเล่นเสียง
ใบสมัครที่เป็นปัญหาเขียนโดยพนักงาน บริษัทเยอรมันเอสเซอร์ ออดิโอ. องค์กรนี้มีส่วนร่วมในการสร้างและจัดจำหน่ายผลิตภัณฑ์ซอฟต์แวร์ (ฯลฯ) ซึ่งมีวัตถุประสงค์หลักเพื่อการทดสอบและทดสอบอุปกรณ์เครื่องเสียง โปรแกรมจาก Esser Audio โดดเด่นด้วยฟังก์ชันการทำงานที่ดีและอินเทอร์เฟซที่เรียบง่ายมาก
โปรแกรม PWM Generator เป็นแชร์แวร์ เวอร์ชันทดลองใช้งานช่วยให้คุณสามารถเปิดและทดสอบแอปพลิเคชันได้อย่างอิสระในช่วงสามสิบวันแรก ค่าใช้จ่ายของโปรแกรมสำหรับประเทศนอก สหภาพยุโรปคือ 14 ยูโรสำหรับขาเข้า - 16.66 ยูโร (เนื่องจากการบวกภาษีการขาย) มีส่วนลดให้เมื่อซื้อใบอนุญาตหลายใบ
แอปพลิเคชั่นนี้เผยแพร่เป็นภาษาอังกฤษและ ภาษาเยอรมัน. ไฟล์ช่วยเหลือประกอบด้วย คำอธิบายโดยละเอียดคุณสมบัติซอฟต์แวร์ทั้งหมดและฟอรัมช่วยเหลือออนไลน์ถูกสร้างขึ้นเพื่อให้การสนับสนุนเพิ่มเติมแก่ผู้ใช้แพ็คเกจซอฟต์แวร์ ยังไม่มีเครื่องกำเนิด PWM เวอร์ชันรัสเซีย
ซอฟต์แวร์เวอร์ชันล่าสุดใช้งานได้บนคอมพิวเตอร์ทุกเครื่องที่มีระบบปฏิบัติการ Microsoft Windows 32 หรือ 64 บิต (9x, NT, 2000, 2003, XP, Vista, 7, 8) และการ์ดเสียง
การจัดจำหน่ายโปรแกรม:แชร์แวร์ 14 ยูโร มีรุ่นทดลอง (30 วัน)
สุขสันต์วันเกิดเว็บไซต์และแมวหลัก! และยังเป็นผู้ดำเนินรายการและทุกคนที่ช่วยให้ไซต์ดีขึ้นและน่าสนใจยิ่งขึ้น ขอให้โชคดี! ติดตามมัน! โดยส่วนตัวแล้วฉันฉลองวันเกิดแมวตามภาพซึ่งฉันแนะนำให้ทุกคนทำ
“เพื่อที่จะเข้าใจกระบวนการอย่างชัดเจน คุณต้องได้ยินเกี่ยวกับมันร้อยครั้งหรือเพียงแค่เห็นมันเพียงครั้งเดียว”
ทุกวันนี้ โลกทั้งโลกหมุนรอบการปรับความกว้างพัลส์ (PWM) และไม่จำเป็นต้องพูดว่า แม้แต่กลางวันและกลางคืนก็ยังขึ้นอยู่กับ PWM (ในฤดูหนาว กลางวันจะสั้นกว่ากลางคืนและในทางกลับกัน J) ตอนนี้ PWM ถูกใช้ทุกที่ที่คุณสามารถจินตนาการถึงการใช้งานได้: ตัวควบคุม ตัวปรับความเสถียร ตัวแปลง อุปกรณ์จ่ายไฟ และอุปกรณ์อื่น ๆ เมื่อคำนึงถึงแนวโน้มของพลังงานที่เพิ่มขึ้นการเพิ่มขึ้นอย่างต่อเนื่องของความถี่ที่ใช้ในเทคโนโลยีพลังงานและตัวแปลงตลอดจนน้ำหนักและขนาดที่ลดลงฉันตัดสินใจว่าจำเป็นสำหรับทุกคนที่จะมีเครื่องกำเนิด PWM ที่หลากหลาย ห้องปฏิบัติการที่บ้านของพวกเขา แต่แน่นอนว่านี่ไม่ควรเป็นเพียงเครื่องกำเนิดไฟฟ้า จำเป็นต้องมีการปรับความถี่ด้วย หลากหลาย, การควบคุมรอบการทำงาน, การควบคุม DEAD TIME, เอาต์พุตแบบปลายเดี่ยวและแบบพุชพูล และการกลับเอาต์พุตสำหรับแต่ละตัว การกลับด้านของเอาต์พุตจำเป็นต่อการทดสอบบริดจ์คอนเวอร์เตอร์ และคุณไม่มีทางรู้ว่าคุณต้องการสำรวจอะไรอีก แต่ในขณะเดียวกันก็ควรประกอบ ปรับเปลี่ยน และทำซ้ำได้ง่าย ในกรณีนี้จะเพียงพอที่จะครอบคลุมช่วงความถี่ในโหมดรอบเดียวจาก 60 kHz ถึง 2 MHz ในโหมด push-pull จาก 30 kHz ถึง 1 MHz ปรับรอบการทำงานในโหมดรอบเดียวจาก 1% เป็น 99% และในโหมดกดดึงจาก 2% เป็น 98% พร้อมความสามารถในการปรับการหยุดชั่วคราว DEAD TIME เครื่องกำเนิดไฟฟ้าต้องมีจำนวนสวิตช์ช่วงขั้นต่ำ ทุกอย่างควรปรับได้อย่างราบรื่นและไม่มีการกระโดด ขอแนะนำให้ตั้งค่าหยาบและละเอียดสำหรับพารามิเตอร์ควบคุมแต่ละตัว
การใช้เครื่องกำเนิดไฟฟ้าดังกล่าวทำให้คุณสามารถตรวจสอบคุณภาพของไดรเวอร์ควบคุมได้ ทรานซิสเตอร์สนามผล, ตัวบ่งชี้ความเร็วของส่วนประกอบต่างๆ และอื่นๆ อีกมากมาย
เพื่อไม่ให้คุณเบื่อกับการอ่านบทความทั้งหมด ฉันจะแสดงให้คุณเห็นทันทีว่าได้รับสัญญาณประเภทใดที่เอาต์พุตในโหมดต่างๆ และความถี่ที่ต่างกัน:
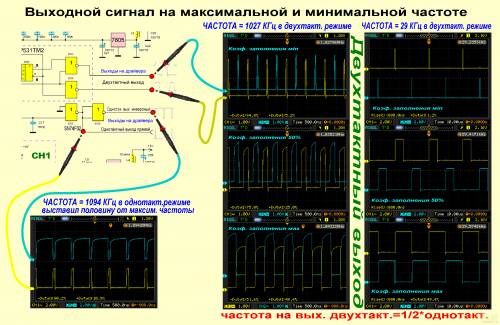
เมื่อใช้เครื่องกำเนิดไฟฟ้านี้ ฉันจะสตาร์ทแหล่งจ่ายไฟใด ๆ ที่วงจรไมโครไม่ให้แรงกระตุ้นในการสตาร์ทหรือเข้าสู่การป้องกันโดยไม่ทราบสาเหตุ การเพิ่มรอบการทำงานอย่างราบรื่นฉันดูสิ่งที่เกิดขึ้นที่เอาต์พุตของบล็อกหรือการแบ่งกระแสของทรานซิสเตอร์หลัก การค้นหาข้อบกพร่องใดๆ บล็อกชีพจรด้วยเครื่องกำเนิดนี้ มันเป็นเพียงเทพนิยายและใช้เวลาเพียงไม่กี่นาที ตัวอย่างเช่น ฉันถอดเกทของทรานซิสเตอร์กำลังออกจากไมโครวงจรเดิมและเชื่อมต่อกับเครื่องกำเนิดไฟฟ้าพร้อมไดรเวอร์ ในการเชื่อมต่อด้านสูงกับอุปกรณ์แบบพุชดึง บางครั้งจำเป็น คุณจำเป็นต้องใช้ออปโตไดรเวอร์กับ 6N137 หรือออปโตคัปเปลอร์แบบเร็วอื่นๆ
คุณยังสามารถตรวจสอบได้ว่าแอมพลิฟายเออร์ปฏิบัติการและแอมพลิฟายเออร์เสียงชนิดใดที่เหมาะกับ เนื่องจากมีเพียงตัวทวนแรงดันไฟฟ้าเท่านั้นที่มีการบิดเบือนน้อยที่สุด ฉันจึงจะทำการทดสอบในโหมดนี้ ฉันจะยกตัวอย่างการทดสอบแอมพลิฟายเออร์ปฏิบัติการประเภท LM358 ที่พบบ่อยที่สุด สิ่งนี้จะทำให้ผู้รักเสียงเพลงบางคนตกใจ ดังนั้นฉันไม่แนะนำให้ใช้ LM358 ในแอมพลิฟายเออร์เสียงระดับต่ำโดยเด็ดขาด

เพื่อความสนุกสนาน ฉันใช้ opamp โซเวียตตัวแรก K140UD1B และนำไปทดสอบ ประสิทธิภาพของมันดีกว่า LM358 อย่างมาก
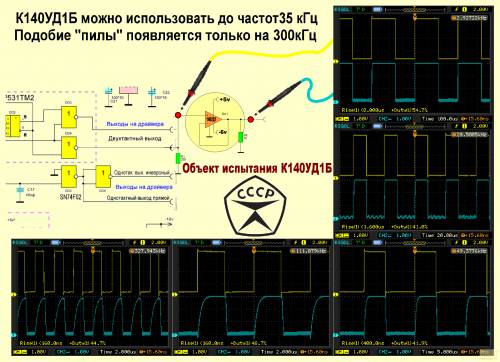
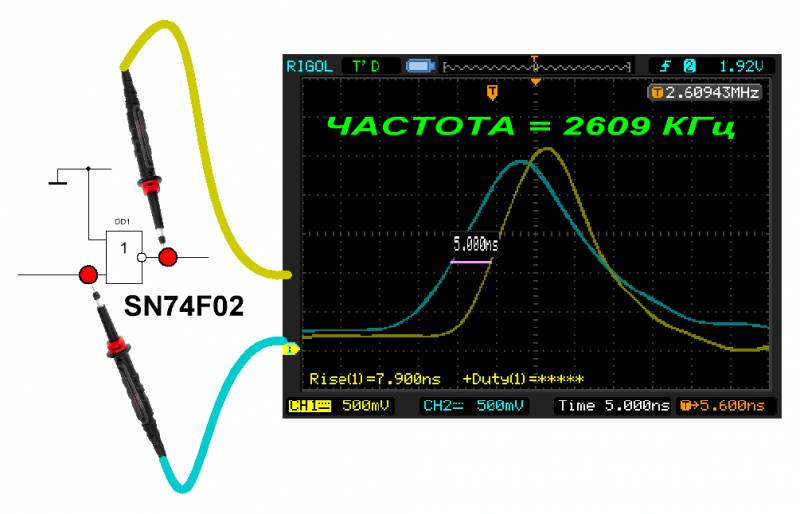
คุณสามารถตรวจสอบเวลาหน่วงในลอจิกเกตและความกว้างพัลส์ขั้นต่ำสำหรับฟลิปฟล็อปได้
ฉันยังตรวจสอบด้วยว่าซีเนอร์ไดโอด TL431 จะทำงานที่ความถี่ 1.3 MHz ได้อย่างไร:
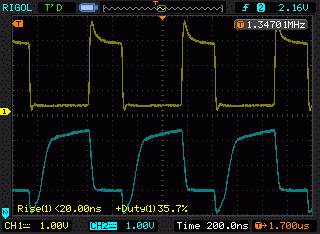
สีเหลืองคือทางเข้า สีฟ้าคือทางออก
และยังได้สัมผัสและตรวจสอบอีกมากมาย…….
โดยสรุปคือความสามารถของเครื่องกำเนิดของฉัน
เมื่อฉันกำหนดงานให้ตัวเอง ฉันพยายามค้นหาใน Google และค้นหาวิธีแก้ปัญหาสำเร็จรูป การค้นหาไม่สำเร็จ จึงได้ตัดสินใจสร้างวงจรที่ตอบโจทย์ความต้องการ ตอนนี้ฉันจะแนะนำให้คุณรู้จักกับผลการวิจัยของฉันที่กินเวลาประมาณหนึ่งปี
งานวิจัยของฉัน
ศึกษาที่หนึ่ง: บนตัวควบคุม PWM สำเร็จรูป
เมื่อมองแวบแรก วงจรที่น่าสนใจและเรียบง่ายที่สุดที่พบในเอกสารข้อมูลและอินเทอร์เน็ตดูเหมือนจะเป็นวงจรที่ใช้ตัวควบคุม PULSE WIDTH MODULATION สำเร็จรูปประเภท TL494 และอะนาล็อก KA7500 TL 494 และเวอร์ชันต่อๆ ไปเป็นชิปที่ใช้กันมากที่สุดสำหรับการก่อสร้าง ตัวแปลงแบบพุชพูลโภชนาการ
แต่ในความเป็นจริงแล้ว โซลูชันนี้เหมาะกับงานของเราเพียง 1/10 ของโซลูชันเท่านั้น และไม่สามารถใช้ที่ความถี่ที่สูงกว่า 100 kHz - ในโหมดรอบเดียวและสูงถึง 50 kHz - ในโหมดพุชพูล ทำไม แม้ว่าตามเอกสารข้อมูลจะสามารถใช้งานได้สูงสุด 300 kHz แต่ฉันไม่ชอบวิธีที่มันทำงานที่ความถี่ที่สูงกว่า 100 kHz
เอกสารข้อมูลบอกว่าอะไร:
ความถี่การทำงานที่อนุญาตคือตั้งแต่ 1 ถึง 300 kHz ช่วงที่แนะนำคือ Rt = 1...500 kOhm, Ct = 470pF...10 µF ในกรณีนี้ การเคลื่อนตัวของอุณหภูมิโดยทั่วไปของความถี่โดยไม่คำนึงถึงการเคลื่อนตัวของส่วนประกอบที่ต่ออยู่คือ +/-3% และการเคลื่อนตัวของความถี่ที่ขึ้นอยู่กับแรงดันไฟฟ้าของแหล่งจ่ายจะอยู่ภายใน 0.1% ในช่วงที่อนุญาตทั้งหมด แต่ประเด็นไม่ใช่การเคลื่อนตัวของความถี่ แต่เป็นความไม่แน่นอนของการควบคุมปัจจัยการเติมซึ่งขึ้นอยู่กับความถี่
ฉันพยายามทดสอบความสามารถของมัน และต้องการครอบคลุมช่วง 2 MHz ที่ฉันต้องการ แต่ที่ความถี่สูงกว่า 1 MHz เครื่องไม่สามารถเริ่มทำงานได้ตามปกติ ฉันต้องจำกัดตัวเองให้เหลือเพียง 1 MHz ในตอนนี้ ฉันสร้างช่วงควบคุมความถี่ห้าช่วง ติดตั้งตัวปรับแรงดันไฟฟ้าที่ 12 โวลต์สำหรับแหล่งจ่ายไฟที่มีตัวเก็บประจุแบบบล็อกเพื่อไม่ให้รบกวนความบริสุทธิ์ของการทดลอง และเริ่มการทดสอบ
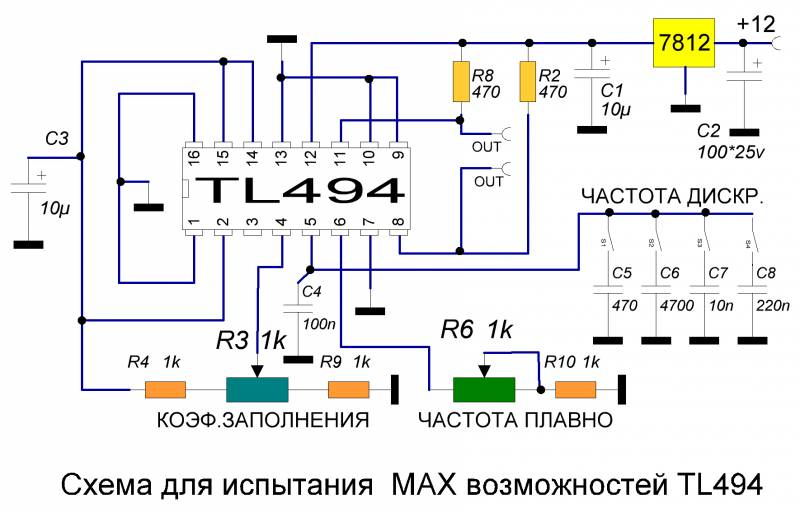
คณะกรรมการพัฒนาวงจรทดลอง:
จัมเปอร์สำหรับการเลือกความถี่:
ผลการทดสอบความสามารถของ TL494:
ไมโครเซอร์กิตนี้ไม่เหมาะกับความต้องการของฉันสำหรับเครื่องกำเนิดไฟฟ้าและไม่มีวิธีการหรือลูกเล่นในการโอเวอร์คล็อกให้เป็นความถี่ที่สูงขึ้นนำไปสู่สิ่งใด ขีดจำกัดของความฝันคือ 100 kHz (ขยายได้ถึง 150 kHz) สำหรับข้อมูลเพิ่มเติม ความถี่สูงตัวเปรียบเทียบที่ช้ามากที่ใช้ในวงจรคริสตัลทำให้รู้สึกได้ การแก้ไขในตัวยังรบกวนการเพิ่มความถี่อีกด้วย เราอ่านจากแผ่นข้อมูลถึงคุณสมบัติของไมโครวงจรนี้:
เพื่อการทำงานที่เสถียรของทริกเกอร์ เวลาสวิตช์ของส่วนดิจิทัลของ TL494 คือ 200 ns ที่ความถี่สัญญาณนาฬิกาสูงถึง 150 kHz โดยมีแรงดันไฟฟ้าควบคุมเป็นศูนย์ เฟสพัก = 3% ของช่วงเวลา (ไบแอสเทียบเท่าของสัญญาณควบคุม 100..120 mV) ที่ความถี่สูง การแก้ไขในตัวจะขยายเฟสพักเป็น 200 .300 น. เนื่องจากมีแอมพลิฟายเออร์ข้อผิดพลาดช้ามาก (อันที่จริงแอมพลิฟายเออร์ในการปฏิบัติงานที่มี Ku = 70..95 dB ที่แรงดัน DC, Ku = 1 ที่ 300 kHz) ฉันจึงไม่ใช้พวกมันในวงจรทดสอบเลยและพวกมันถูกบล็อก แอมพลิฟายเออร์เหล่านี้ไม่ได้ออกแบบมาให้ทำงานภายในหนึ่งรอบสัญญาณนาฬิกาของความถี่ในการทำงาน ด้วยความล่าช้าในการแพร่กระจายสัญญาณภายในแอมพลิฟายเออร์ 400 ns พวกมันจึงช้าเกินไปสำหรับสิ่งนี้ และลอจิกควบคุมทริกเกอร์ไม่อนุญาต (พัลส์ด้านข้างจะปรากฏที่เอาต์พุต) ในวงจรแปลงแรงดันไฟฟ้าจริง ความถี่คัตออฟของวงจรป้อนกลับจะถูกเลือกตามลำดับ 2 - 10 kHz
หมายเหตุเกี่ยวกับการทำงานของชิป 494 ที่ความถี่สูงกว่าที่ไม่เหมาะกับฉัน:
1. เครื่องกำเนิดแรงดันไฟฟ้าแบบฟันเลื่อยในตัวจะลัดวงจรตัวเก็บประจุเป็นเวลานานซึ่งเป็นผลมาจากการที่แพลตฟอร์มที่มีศักยภาพเป็นศูนย์ปรากฏขึ้นก่อนรอบการชาร์จใหม่
ออสซิลโลแกรมของการทำงานของเครื่องกำเนิดไฟฟ้าที่ความถี่ต่างๆ:
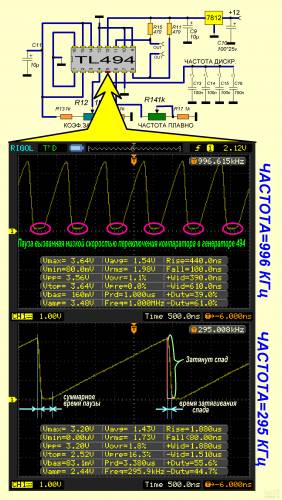
2. การพึ่งพารอบการทำงานกับความถี่อย่างมากซึ่งแสดงออกโดยมีผลเพิ่มขึ้นหลังจากผ่านความถี่ 100 kHz
เมื่อพิจารณาออสซิลโลแกรมของการทำงานของตัวควบคุม PWM ด้วย TL494 ที่ความถี่ที่แตกต่างกันโดยมีรอบการทำงานสูงสุดและต่ำสุดการเปลี่ยนแปลงของรอบการทำงานขั้นต่ำและสูงสุดขึ้นอยู่กับความถี่จะมองเห็นได้ชัดเจน
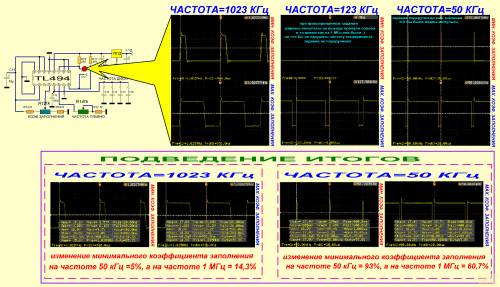
อย่างที่คุณเห็นการเปลี่ยนแปลงในรอบการทำงานขั้นต่ำที่ความถี่ 50 kHz = 5% และที่ความถี่ 1 MHz = 14.3% แตกต่างกันเกือบสามครั้ง แต่โดยทั่วไปการเปลี่ยนแปลงรอบการทำงานสูงสุดนั้นน่าประหลาดใจ: ที่ความถี่ 50 kHz = 93% และที่ความถี่ 1 MHz = 60.7% ต่างกัน 32%!!!
นั่นเป็นเหตุผลว่าทำไมสิ่งนี้จึงง่ายและ แผนภาพที่สะดวกฉันวางมันไว้ข้างๆ มันจะมีประโยชน์สำหรับฉันในอนาคต: ฉันจะยังคงกลับมาใช้มัน แต่คราวนี้ใช้ตัวเปรียบเทียบที่รวดเร็วแบบแยกและทริกเกอร์แบบเร็วปกติ
ศึกษาที่สอง: ในตัวจับเวลา 555
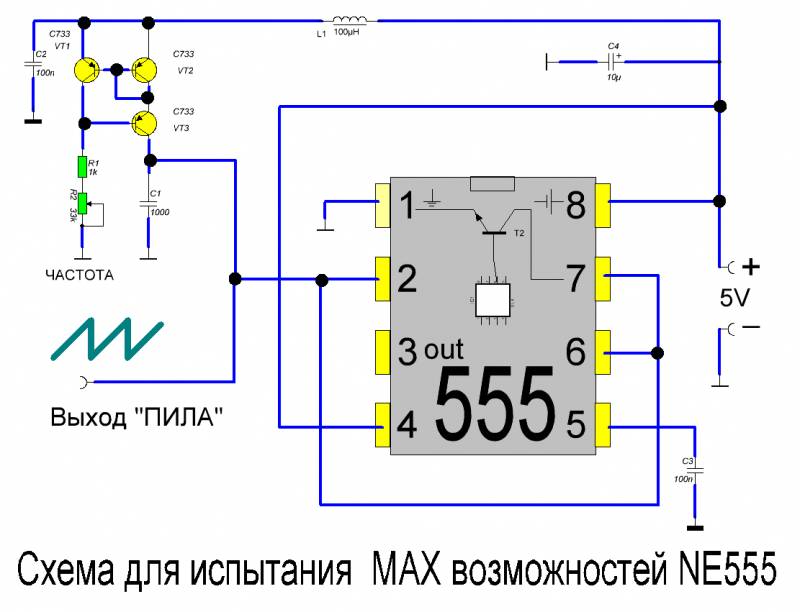
ต่อไปตลอดทางฉันมีวงจรที่ใช้ตัวจับเวลา NE555 ซึ่งฉันใช้เป็นเครื่องกำเนิดแรงดันไฟฟ้าแบบฟันเลื่อยเท่านั้น ฉันไม่รู้ว่ามันจะช้าเหมือนกัน แต่ก็ยังดีกว่า TL494 รุ่นก่อนหน้าเล็กน้อย ด้วยคุณสามารถเพิ่มความถี่ได้ประมาณ 200 kHz ในโหมดรอบเดียว คุณเพียงแค่ต้องเพิ่มตัวเปรียบเทียบและทริกเกอร์ด้วยตรรกะ OR-NOT
วงจรออสซิลเลเตอร์ตามตัวจับเวลา 555:
ออสซิลโลแกรมของการทำงานของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อยบนตัวจับเวลา 555 ที่ความถี่ 332 kHz และ 462 kHz
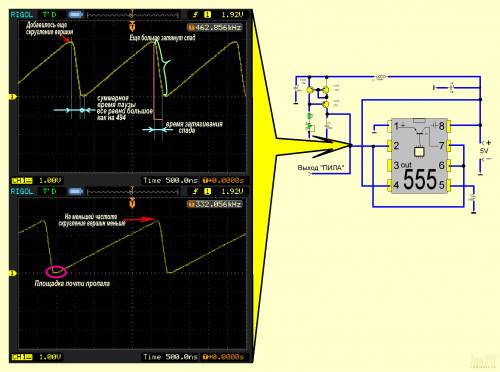
ที่นี่คุณจะเห็นการปัดเศษของยอดเขาและการลดลงของแรงกระตุ้น ที่ความถี่สูงกว่า 500 kHz จะไม่สามารถจดจำเลื่อยได้
ผิดหวังใน โซลูชั่นสำเร็จรูปเฉพาะองค์ประกอบแอนะล็อกเท่านั้นที่ฉันพยายามสังเคราะห์ PWM บนองค์ประกอบลอจิกดิจิทัลและตัวนับพร้อมทริกเกอร์ล้วนๆ โดยไม่ต้องใช้ส่วนประกอบแอนะล็อก แต่มีอย่างอื่นอีกมากมาย ปัญหาที่ซับซ้อน. การจัดตำแหน่งของความล่าช้าในการแพร่กระจายสัญญาณข้ามองค์ประกอบ ฯลฯ โดยเฉพาะ ปัญหาใหญ่ประกอบด้วยทริกเกอร์และตัวนับที่ไม่ต้องการคลิกเลยในช่วงระยะเวลาพัลส์สั้น ๆ และข้ามการนับอย่างโง่เขลา ซึ่งหมายความว่าคีย์ที่ตัวสร้างจะทำงานจะสิ้นสุดลงในไม่ช้า ฉันละทิ้งความคิดนี้หลังจากต่อสู้กับตรรกะ 561 มาหนึ่งสัปดาห์ ปรากฎว่าความถี่ดังกล่าวช้ามาก - 20 MHz เมื่อแบ่ง PWM 10% หลังจากนั้นอีกสองสัปดาห์ฉันก็ปฏิเสธ 1533 ด้วย
วงจรสุดท้ายของเครื่องกำเนิดไฟฟ้า
หลังจากพยายามไม่สำเร็จหลายครั้งเพื่อทำให้ความฝันของฉันเป็นจริง (เพื่อให้มีเครื่องกำเนิดไฟฟ้าที่มี 2 MHz PWM ในห้องปฏิบัติการที่บ้านของฉัน) ฉันพักหนึ่งหรือสองสัปดาห์ คิด มีกำลังเพิ่มขึ้น และเริ่มแก้ไขปัญหาอีกครั้ง คราวนี้ไม่มีลูกเล่นและวิธีง่าย ๆ โดยคำนึงถึงการพัฒนาและข้อผิดพลาดก่อนหน้านี้ จากโซลูชันทั้งหมดที่ทดสอบ TL494 หรือวงจรจับเวลาช่วยให้ใช้งานได้ง่ายที่สุด ดังนั้นจึงตัดสินใจโคลนฮาร์ดแวร์ NE555 และ TL494 โดยใช้ส่วนประกอบความเร็วสูงและประกอบ "symbiosis" ของไมโครวงจรทั้งสองโดยใช้ตัวเปรียบเทียบและตรรกะแยกกัน ฉันเอาตัวเปรียบเทียบกับเอาต์พุต TTL ที่อยู่บนโต๊ะของฉัน - KR597CA2 แต่ก็เป็นไปได้เช่นกัน ที่สำคัญที่สุดคือทำงานเร็วและมีเอาต์พุต TTL ถ้าคุณต้องการที่จะคลั่งไคล้ ESL ก็จะเย็นกว่ามาก (ดังนั้น 20 MHz ไม่ใช่ขีด จำกัด ) แต่ฉันไม่ต้องการความถี่สูงขนาดนี้ (ยกเว้นตัวแปลงที่มีการเหนี่ยวนำโดยไม่มีแกนเฟอร์ไรต์) จากนั้นคุณจะต้องติดตั้ง KR597CA1 และตรรกะซีรีส์ K500
หลังจากการเปิดตัวโครงการครั้งแรก มีการค้นพบเหตุการณ์ต่างๆ มากมาย แต่เมื่อการดีบักดำเนินไป ปัญหาต่างๆ มากมายก็ถูกขจัดออกไป และโครงการก็ทำงานเหมือนเครื่องจักร

วงจรประกอบด้วยเครื่องกำเนิดแรงดันไฟฟ้าแบบฟันเลื่อย (ประกอบด้วยตัวปรับกระแสบนทรานซิสเตอร์ VT1, VT2, VT3; ตัวเปรียบเทียบสองตัว DA1, DA2; ทริกเกอร์ DD1 และทรานซิสเตอร์คายประจุ VT4) วงจรสำหรับแยกพัลส์สี่เหลี่ยม (ที่มีความกว้างขึ้นอยู่กับเกณฑ์ แรงดันไฟฟ้าบน DA3), แรงดันไฟฟ้าอ้างอิงของสเตบิไลเซอร์สองตัว (2.5V และ 2.9V), สัญญาณแบบพุชดึง (บนทริกเกอร์ DD2 และองค์ประกอบ DD3 DD4 2-OR-NOT), รีพีตเตอร์และอินเวอร์เตอร์สำหรับเอาต์พุตรอบเดียว (บน DD5, DD6 ).
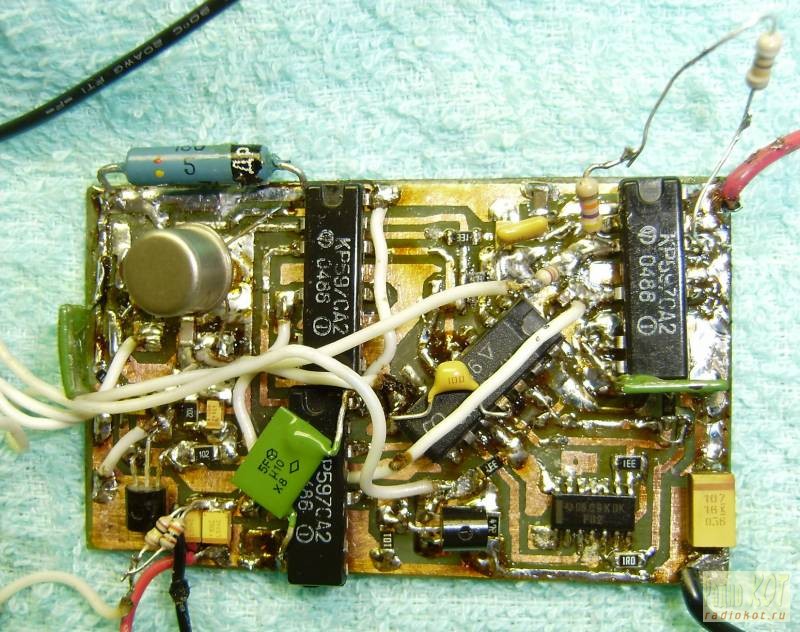
รูปถ่ายของเขียงหั่นขนม:
เพื่ออำนวยความสะดวกในกระบวนการตั้งค่า ฉันจะจัดเตรียมออสซิลโลแกรมแรงดันไฟฟ้าไว้ในแต่ละอัน จุดสำคัญโครงการ ดังนั้น…
เครื่องกำเนิดแรงดันไฟฟ้าทางลาด ตัวเก็บประจุถูกชาร์จผ่านตัวปรับกระแสไฟ ช่อง 1 - แรงดันไฟฟ้าที่ตัวเก็บประจุ C5, ช่อง 2 - แรงดันไฟฟ้าที่ฐานของทรานซิสเตอร์ดิสชาร์จ VT4
กราฟแสดงข้อเท็จจริงที่อธิบายไม่ได้เกี่ยวกับแรงดันไฟฟ้าที่ออกจากพื้นที่ ค่าลบแต่สิ่งนี้จะไม่รบกวนการทำงานเนื่องจากในภายหลังฉันจะแนะนำอคติเชิงลบเล็กน้อยในวงจรเพื่อแยกพัลส์สี่เหลี่ยมเป็นแรงดันไฟฟ้าที่ตั้งไว้โดยใช้ตัวแบ่ง R6, R10 เพื่อครอบคลุมช่วงการเปลี่ยนแปลงทั้งหมดของแรงดันไฟฟ้า "เลื่อย" . เลือก R1 เพื่อจำกัดความถี่สูงสุดด้านบน (ฉันจำกัดตัวเองไว้ที่ 2 MHz แม้ว่าวงจรทั้งหมดจะทำงานได้ดีสูงสุด 5 MHz)
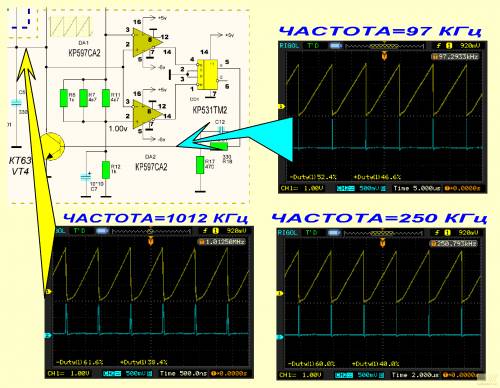
ออสซิลโลแกรมแรงดันไฟฟ้าที่เอาต์พุตของตัวเปรียบเทียบ DA1, DA2 ที่ความถี่ต่างกัน ช่อง 1 – แรงดันไฟฟ้าบนตัวเปรียบเทียบ DA1 พิน 14, ช่อง 2 – แรงดันไฟฟ้าบนตัวเปรียบเทียบ DA2 พิน 14:
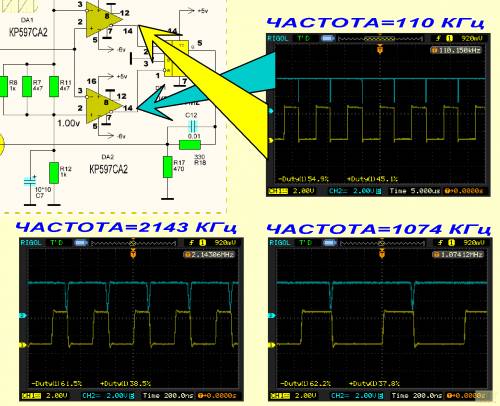
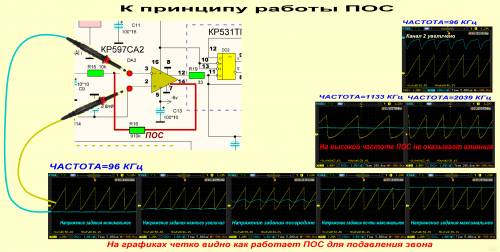
เพื่อต่อสู้กับ "เสียงกริ่ง" ของตัวเปรียบเทียบใกล้กับโซนสวิตชิ่ง ในวงจรสำหรับแยกพัลส์สี่เหลี่ยมบน DA3 ฉันแนะนำตัวต้านทาน POS (ตอบรับเชิงบวก) R16, R15 ที่อินพุตและเอาต์พุตของตัวเปรียบเทียบที่มีชื่อเดียวกัน จำเป็นต้องใช้ PIC ที่ความถี่ต่ำกว่า 1 MHz ที่ความถี่ 2 MHz ไม่จำเป็นต้องใช้วงจรนี้และสิ้นสุดการมีส่วนร่วมในการทำงานดังที่เห็นได้จากออสซิลโลแกรม ออสซิลโลแกรมแรงดันไฟฟ้าที่อินพุตของเครื่องเปรียบเทียบ DA3 ที่ความถี่ต่างกัน แชนเนล 2 – แรงดันไฟฟ้าบนตัวเปรียบเทียบ DA3, พิน 2 – การตั้งค่าเกณฑ์การสลับ, แชนเนล 1 – แรงดันไฟฟ้าบนตัวเปรียบเทียบ DA3, พิน 3 จากเครื่องกำเนิด "เลื่อย" ออสซิลโลแกรมที่ความถี่ 96 kHz ช่อง 2 ขยายใหญ่ขึ้น เส้นหยักสามารถมองเห็นได้พร้อมกันกับการสลับตัวเปรียบเทียบ - นี่คืองานของ PIC ในการตั้งค่าฮิสเทรีซิส ความลึกของฮิสเทรีซีสสามารถลดลงได้ แต่คีย์ที่เครื่องกำเนิดไฟฟ้าจะควบคุมนั้นมีความเสี่ยง ดังนั้นเราจะไม่เปลี่ยนแปลงทุกอย่าง
ถัดไปเป็นวงจรสำหรับเลือกพัลส์สี่เหลี่ยมที่มีความกว้างขึ้นอยู่กับแรงดันไฟฟ้าเกณฑ์บน DA3 แรงดันไฟฟ้าฟันเลื่อยจะจ่ายให้กับอินพุตโดยตรงของตัวเปรียบเทียบ และแรงดันไฟฟ้าสำหรับตั้งค่าเกณฑ์การเปลี่ยนตัวเปรียบเทียบจะถูกส่งไปยังอินพุตผกผัน ผลลัพธ์ก็คือ ชีพจรสี่เหลี่ยม. เราดูออสซิลโลแกรม ทำความเข้าใจ และเจาะลึกลงไป
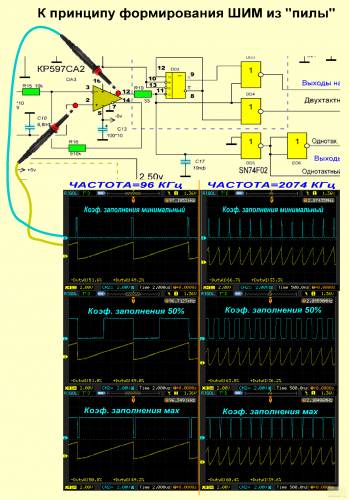
ทุกอย่างชัดเจนที่นี่ เฉพาะในกรณีที่คุณต้องการเอาต์พุตแบบพุชพูลสำหรับการทำงาน คุณไม่ควรถูกปล่อยให้มีรอบการทำงานที่น้อยมาก (99%) เนื่องจากทริกเกอร์ไม่มีเวลาที่จะสลับในช่วงเวลาสั้น ๆ ของพัลส์อินพุต และจะข้ามช่วงเวลาโดยสร้างพัลส์รอบเดียวที่เหมือนกันสองอันที่เอาต์พุต แทนที่จะเป็นพัลส์แบบพุชพูลในทางกลับกัน และนี่เต็มไปด้วยความเลวร้าย ผลที่ตามมา เช่น การแยกคีย์ที่เปิดพร้อมกัน
ฉันวางสิ่งที่เกิดขึ้นบนหน้าสัมผัสเอาต์พุตในภาพแรก เราพิจารณาอย่างรอบคอบและศึกษา ดังที่เห็นได้จากกราฟ ระยะเวลาพัลส์ขั้นต่ำที่เอาต์พุตแบบพุชพูลจะเพิ่มขึ้นเป็น 5% เพื่อให้ทริกเกอร์สลับได้อย่างชัดเจนที่ความถี่อินพุต 2 MHz ที่ความถี่สูงถึง 500 kHz สามารถตั้งค่าเป็น 1% ได้โดยไม่ต้องกลัวว่าพัลส์จะหายไป
ความแตกต่างหลักในการตั้งค่าเครื่องกำเนิดไฟฟ้า: สิ่งที่สำคัญที่สุดคือการปิดกั้นตัวเก็บประจุเซรามิกประเภท KM-5 ขั้นต่ำ 0.1 μFหรือ SMD ที่นำเข้าบนตัววงจรไมโครแต่ละตัว หากไม่มีพวกมันวงจรจะทำงานไม่เสถียรมาก ด้านหนึ่งของกระดานใช้สำหรับรางและอีกด้านใช้เป็นตะแกรงต้องเชื่อมต่อกับเคสหลายจุด
แหล่งจ่ายไฟไม่มีคุณสมบัติพิเศษใดๆ สำหรับช่อง +12v จะใช้ Krenka หรือ 7812 และสำหรับช่อง 6v จะใช้ 7906
ฉันจะเขียนเกี่ยวกับไดรเวอร์เอาท์พุตประมาณ 2 MHz ในภายหลัง ไม่เช่นนั้นก็ยังมีเรื่องให้อ่านอีกมาก คุณสามารถใช้ชิปไดรเวอร์สำเร็จรูปหรือประกอบโดยใช้องค์ประกอบที่ไม่ต่อเนื่อง
ขอขอบคุณสำหรับความสนใจ และความอดทน และความแข็งแกร่งในการอ่านบรรทัดนี้
ฉันขอแสดงความยินดีกับคุณและขอให้คุณวาเลอเรียนมากด้วย!!!
Breadboard ในเค้าโครง 5 วิดีโอของเครื่องกำเนิดไฟฟ้าในโหมดต่างๆ และรูปภาพแยกกันในไฟล์
รหัส: 1092
|
คุณคิดอย่างไรกับบทความนี้? |



