ข้าว. 96
บัฟเฟอร์แอมพลิฟายเออร์ DA3 พร้อมอินพุต - อินพุต 3 และอินพุต 4 - เชื่อมต่อกับจุดเอาต์พุตของช่องสัญญาณแรงดันทุติยภูมิ เมื่อใช้ร่วมกับฟังก์ชันบัฟเฟอร์ แอมพลิฟายเออร์นี้จะปรับระดับแรงดันไฟฟ้าที่ควบคุมให้เป็นปกติ กล่าวคือ ทำหน้าที่เป็นตัวแบ่งแรงดันไฟ เพื่อให้สามารถเปรียบเทียบค่ากับแหล่งอ้างอิงแรงดันไฟระบุได้ การเปรียบเทียบค่าแรงดันไฟเหล่านี้และการสร้างสัญญาณผิดพลาดนั้นดำเนินการโดยแอมพลิฟายเออร์ DA2 สัญญาณผิดพลาดผ่านดีคัปปลิ้งไดโอด VD 2 ถูกป้อนเข้าหนึ่งในอินพุตของตัวเปรียบเทียบ DA4 อินพุตที่สองของตัวเปรียบเทียบจะได้รับแรงดันฟันเลื่อยที่สร้างโดยสเตจ FPN การเริ่มต้นของน้ำตก FPN (จุดเริ่มต้นของทางลาดของแรงดันไฟฟ้า) และการรีเซ็ตกระบวนการของช่วงเวลาก่อนหน้าพร้อมกันเกิดขึ้นในขณะที่ด้านหน้าของพัลส์ที่สร้างโดยเครื่องกำเนิดมาถึง เครื่องกำเนิดไฟฟ้าสร้างลำดับของพัลส์ที่มีลักษณะความถี่ที่ค่อนข้างเสถียร สิ่งนี้จะสิ้นสุดการทำงานของตัวควบคุม PWM ที่ระดับการประมวลผลสัญญาณแอนะล็อก การก่อตัวเพิ่มเติมของสัญญาณ PWM เกิดขึ้นในรูปแบบดิจิทัล ซึ่งองค์ประกอบที่ทำงานอยู่ทั้งหมด ซึ่งรวมถึงองค์ประกอบที่ไม่ต่อเนื่องจาก CC จะทำงานในโหมดหลัก
หลังจากที่ตัวเปรียบเทียบ DA4 ทำงานเกี่ยวกับอิทธิพลของอินพุตแล้ว ลำดับของพัลส์จะปรากฏขึ้นที่เอาต์พุต ซิงโครนัสกับความถี่ของแรงดันฟันเลื่อย แต่ด้วยระยะเวลาที่มอดูเลตของพัลส์เอง - สัญญาณ PWM ดิจิตอล ลำดับนี้ถูกป้อนไปยังอินพุตขององค์ประกอบดิจิทัล DD2.1, DD2.2 ซึ่งทำหน้าที่ตรรกะ AND (วงจรความบังเอิญที่ระดับตรรกะสูง) ลำดับของพัลส์ถูกส่งไปยังอินพุตที่สองของแต่ละองค์ประกอบของวงจร DD2 ซึ่งความถี่นั้นต่ำกว่าความถี่เดิมที่สร้างโดยเครื่องกำเนิดสองเท่า ความถี่ลดลงครึ่งหนึ่งในองค์ประกอบ DD1 - D-flip-flop เปิดในโหมดการแบ่งความถี่ดั้งเดิม การเปลี่ยนแปลงสถานะของเอาต์พุตทริกเกอร์เกิดขึ้นเมื่อด้านหน้าของพัลส์ที่สร้างโดยเครื่องกำเนิดมาถึงอินพุตการนับ ที่เอาต์พุตของ flip-flop Q (เอาต์พุตโดยตรง) และ -Q (เอาต์พุตแบบผกผัน) สัญญาณจะเป็นแอนติเฟสในแต่ละช่วงเวลา ในช่วงเวลาที่เกิดความบังเอิญของสัญญาณระดับสูงจากตัวเปรียบเทียบและสัญญาณจากตัวแบ่งความถี่ (ทริกเกอร์) พัลส์ระดับสูงจะปรากฏที่อินพุตขององค์ประกอบ DD2 และที่เอาต์พุต ความถี่ของพัลส์ที่เอาต์พุตของแต่ละองค์ประกอบ DD2 เกิดขึ้นพร้อมกับช่วงเวลาของความถี่ดั้งเดิมของเครื่องกำเนิดไฟฟ้าหารด้วยสอง กราฟิคขั้นตอนการทำงานของคอนโทรลเลอร์ PWM จะแสดงในรูปแบบของไดอะแกรมในรูปที่ 97. จุดบนไดอะแกรม (รูปที่ 97) ซึ่งแสดงไดอะแกรมความเค้นจะถูกทำเครื่องหมายด้วยตัวเลขในวงกลม เพื่อความชัดเจน ในแผนภาพที่สอง (รูปที่ 97) เส้นโค้งแรงดันไฟฟ้าสำหรับจุดที่ 1 (แรงดันฟันเลื่อย) และ 2 (แรงดันไฟฟ้าที่เอาต์พุตของบัฟเฟอร์แอมพลิฟายเออร์ DA1) จะรวมกัน
การทำงานของตัวควบคุม PWM นี้ดำเนินการดังนี้: ลำดับพัลส์ที่เปลี่ยนเวลาสองครั้งจะถูกส่งไปยังขั้นตอนการประสานงานของ COP จากแต่ละองค์ประกอบของวงจร DD2 นี่เป็นเพราะลักษณะเฉพาะของการสร้างสเตจกำลังของตัวแปลงแรงดันไฟฟ้า ระยะเวลาของพัลส์ในแต่ละลำดับจะแปรผกผันกับค่าปัจจุบันของแรงดันไฟวงจรทุติยภูมิ (ที่โหลด) สเตจกำลังของคอนเวอร์เตอร์อยู่ในสถานะใช้งาน (การถ่ายโอนพลังงาน) ไปยังโหลดระหว่างการทำงานของพัลส์มอดูเลต สิ่งนี้จะปรับแรงดันเอาต์พุตเพื่อรักษาระดับให้อยู่ภายในขอบเขตที่กำหนด
แอมพลิฟายเออร์สเตจ DA1 ได้รับการออกแบบมาเพื่อปิด (บล็อก) วงจรควบคุม PWM ในระหว่างการใช้กระแสไฟที่เพิ่มขึ้นอย่างรวดเร็วในโหลด อินพุตของวงจร DA1 เชื่อมต่อกับเซ็นเซอร์ปัจจุบันที่ติดตั้งในวงจรโหลด ตราบใดที่ความต่างศักย์ที่อินพุต DA1 ไม่เกินค่าที่ระบุ นั่นคือ กระแสโหลดไม่เกินขีดจำกัดสูงสุดที่อนุญาต ตัวควบคุม PWM จะทำงานในโหมดปกติ ในขณะที่กระแสโหลดเพิ่มขึ้นเหนือขีดจำกัดที่กำหนดไว้ที่เอาต์พุตของ DA1 แรงดันไฟฟ้าจะเพิ่มขึ้นเป็นค่าที่เพียงพอที่จะเปิดไดโอด VD 1. ที่แคโทด VD 1 สร้างแรงดันบวก ปิดไดโอด VD 2. สัญญาณข้อผิดพลาดที่มาจากแอมพลิฟายเออร์ข้อผิดพลาด DA2 ไปยังอินพุตของตัวเปรียบเทียบ DA4 ถูกแบ่ง แรงดันไฟฟ้าที่ตั้งไว้ที่อินพุตของตัวเปรียบเทียบจะทำให้พัลส์ที่มาจากพัลส์นั้นแคบลงอย่างรวดเร็วจากวงจรดิจิทัล DD2.1 และ DD2.2 ส่วนกำลังของคอนเวอร์เตอร์จะเข้าสู่โหมดการทำงานที่มีการป้องกัน ซึ่งบังคับจำกัดระดับพลังงานที่ส่งไปยังสถานีคอมเพรสเซอร์ ตัวควบคุม PWM จะคืนค่าการทำงานโดยอัตโนมัติหลังจากเอาเอาท์พุตโอเวอร์โหลดออก
ตัวควบคุมวงจรรวม TL494 ครึ่งสะพานกด-ดึง ตัวแปลงพัลส์แรงดันไฟฟ้า.
ในแหล่งพลังงานสำรองที่ทันสมัย (IVEP) ผู้เชี่ยวชาญ วงจรรวม(IC ซึ่งต่อไปนี้จะเรียกว่า IC)
IC ควบคุมในอุดมคติเพื่อให้แน่ใจว่าการทำงานปกติ ตัวแปลงแบบกดดึงในโหมด PWM จะต้องเป็นไปตามเงื่อนไขส่วนใหญ่ต่อไปนี้:
· แรงดันใช้งานไม่เกิน 40 V;
· ความพร้อมใช้งานของแหล่งแรงดันอ้างอิงที่มีความเสถียรสูง
· การปรากฏตัวของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย;
·  ให้ความเป็นไปได้ของการซิงโครไนซ์กับสัญญาณภายนอกของการสตาร์ทแบบนุ่มนวลที่ตั้งโปรแกรมได้
ให้ความเป็นไปได้ของการซิงโครไนซ์กับสัญญาณภายนอกของการสตาร์ทแบบนุ่มนวลที่ตั้งโปรแกรมได้
การมีแอมพลิฟายเออร์ของสัญญาณผิดพลาด
ด้วยแรงดันไฟฟ้าโหมดทั่วไปสูง
· การปรากฏตัวของเครื่องเปรียบเทียบ PWM;
· การปรากฏตัวของทริกเกอร์ควบคุมชีพจร;
· การมีอยู่ของน้ำตก pre-terminal สองช่องสัญญาณพร้อมระบบป้องกันไฟฟ้าลัดวงจร
· การแสดงตนของตรรกะของการปราบปรามแรงกระตุ้นสองครั้ง
· มีเครื่องมือสำหรับแก้ไขความสมมาตรของแรงดันไฟขาออก
· การมีอยู่ของข้อจำกัดกระแสในช่วงกว้างของแรงดันไฟทั่วไป เช่นเดียวกับข้อจำกัดในปัจจุบันในแต่ละช่วงที่มีการปิดเครื่องในโหมดฉุกเฉิน
· ความพร้อมใช้งาน ระบบควบคุมอัตโนมัติด้วยการส่งโดยตรง
· ตรวจสอบให้แน่ใจว่าปิดเครื่องเมื่อแรงดันไฟของแหล่งจ่ายลดลง
· จัดให้มีการป้องกันแรงดันไฟเกิน;
· ตรวจสอบให้แน่ใจว่าเข้ากันได้กับตรรกะ TTL / CMOS;
· จัดให้มีการเปิดและปิดจากระยะไกล
การแปลงสัญญาณ PWM พื้นฐานทั้งหมดรวมถึงการก่อตัวนั้นดำเนินการโดยโมดูเลเตอร์ที่ทำบนไมโครเซอร์กิต TL494 มีบรรจุภัณฑ์สองประเภทที่ผลิตไมโครเซอร์กิตนี้ อุปกรณ์จ่ายไฟมักใช้แพ็คเกจ DIP พลาสติก 16 พิน (รูปที่ 98) ชื่อเต็มของไมโครเซอร์กิตในแพ็คเกจดังกล่าวคือ TL494CN การกำหนดหมายถึงไมโครเซอร์กิตที่ผลิตโดย Texas Instruments วัตถุประสงค์การใช้งานบทสรุปของไมโครเซอร์กิตแสดงไว้ในตาราง 7.
ตารางที่ 7
บริษัทอื่นบางแห่งผลิตแอนะล็อกที่สอดคล้องกันของไมโครเซอร์กิตนี้เช่นกัน และแต่ละบริษัทต่างก็กำหนดชื่อแบรนด์ของตัวเอง นี่คือตัวอย่างบางส่วน: FUJITSU - MB3759, SAMSUNG-КА7500, FAIRCHILD - TA494, microcircuit การผลิตของรัสเซีย- KR1114EU4, ชาร์ป - IP3MO2 ไมโครเซอร์กิตนี้ได้รับการออกแบบมาโดยเฉพาะสำหรับการสร้างโหนด PWM แพ็คเกจไมโครเซอร์กิต TL494CN มีขั้นตอนที่จำเป็นทั้งหมด
แผนภาพการทำงานของตัวแปลง PWM แบบรวม TL494 แสดงในรูปที่ 99.

รายการที่แสดงบน แผนภาพการทำงานมีชื่อและวัตถุประสงค์ดังต่อไปนี้:
· ในองค์ประกอบที่ประกอบเป็นหน่วยภายใต้ชื่อทั่วไป "เครื่องกำเนิดไฟฟ้า" เวทีหลักของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (FPG) ถูกประกอบขึ้น ลักษณะชั่วคราวของการแกว่งซึ่งกำหนดโดยองค์ประกอบภายนอก Rt, Ct ที่เชื่อมต่อกับขั้ว 5 และ 6 ของ DA6 ในขณะที่ความถี่ในการสร้างจะเท่ากับ
ฉ = 1,1 / (R เสื้อ × กะรัต)
· แหล่งจ่ายแรงดันอ้างอิง (พิน 14) ได้รับการออกแบบมาเพื่อสร้างแรงดันไฟที่เสถียรโดยมีค่าเล็กน้อยที่ +5 V ซึ่งใช้สำหรับการทำงานของขั้นตอนการเปรียบเทียบและการสร้างแรงดันไฟผิดพลาด การอ้างอิงแรงดันไฟฟ้ามีความถูกต้องภายใน± 5%;
องค์ประกอบ DA1 - ตัวเปรียบเทียบ " โซนตาย", ช่วงเวลาระหว่างพัลส์เอาต์พุต;
· องค์ประกอบ DA2 - ตัวเปรียบเทียบสำหรับการเปรียบเทียบสัญญาณที่ไม่ตรงกันและแรงดันฟันเลื่อย - ตัวเปรียบเทียบ PWM
แอมพลิฟายเออร์ปฏิบัติการ DA3 และ DA4 - วงจรสร้างสัญญาณไม่ตรงกัน
· องค์ประกอบที่มีตัวเลข DD1 - DD6 หมายถึงเทคโนโลยีระบบอัตโนมัติแบบดิจิตอลและดำเนินการประมวลผลสัญญาณที่มาจากเครื่องเปรียบเทียบ PWM DA2
· ใช้ทรานซิสเตอร์ VT1 และ VT2 สองตัวเพื่อสร้างแอมพลิฟายเออร์ของระดับและกำลังของลำดับพัลส์เอาต์พุต เอาต์พุตของตัวสะสมและตัวปล่อยของทรานซิสเตอร์เหล่านี้ถูกปล่อยทิ้งไว้เพื่อขยายความเป็นไปได้สำหรับการเชื่อมต่อกับขั้นตอนต่อๆ ไป
แหล่งจ่ายแรงดันคงที่ด้วยพิกัด 0.1 V DA 7;
· แหล่งที่มา กระแสตรงด้วยมูลค่าหน้าบัตร 0.7 mA DA 8.
แอมพลิฟายเออร์ปฏิบัติการของสัญญาณผิดพลาดมีช่วงการทำงานของแรงดันไฟฟ้าอินพุตตั้งแต่ -0.3 ถึง 2 V ค่าสุดท้าย (สูงสุด) สอดคล้องกับ U n - แรงดันไฟฟ้าของไมโครเซอร์กิต มีการตั้งค่าอคติทางเทคโนโลยีที่อินพุตของตัวเปรียบเทียบ "เดดโซน" ซึ่งช่วยให้มั่นใจได้ว่ามีการหยุดชั่วคราวขั้นต่ำระหว่างพัลส์ควบคุม แรงดันใช้งานแหล่งจ่ายไฟบนไมโครเซอร์กิตในช่วง 7 ถึง 40 V สามารถตั้งค่าได้ตามต้องการ ค่าขีด จำกัด ของแรงดันไฟฟ้าของไมโครเซอร์กิตและระดับแรงดันไฟฟ้าที่ตัวสะสมของทรานซิสเตอร์เอาท์พุทคือ 41V ค่าสูงสุดของตัวสะสมกระแส I ถึง maxเท่ากับ 250 mA กระแสไฟที่แนะนำคือ 200 mA การกระจายพลังงานคือ 1 W
ช่วงความถี่ในการทำงานของเครื่องกำเนิดฟันเลื่อยคือตั้งแต่ 1 ถึง 300 kHz ตัวเก็บประจุที่เชื่อมต่อกับพิน 5 ของไมโครวงจร IC สามารถมีค่าใดก็ได้ตั้งแต่ 470 pF ถึง 10 μF ตัวต้านทานสำหรับการติดตั้งระหว่างวงจรขับ - ในช่วง 1.8-500 kOhm
ช่วงอุณหภูมิการทำงานของไมโครเซอร์กิต TL494CN คือ 0-70 ° C
ตัวแปลงพัลส์ที่ทำงานบนหลักการของการปรับความกว้างเป็นหนึ่งในขั้นตอนหลัก แหล่งกำเนิดแรงกระตุ้นโภชนาการ หลักการทำงานของแหล่งกำเนิดคือการไหลของพลังงานทั้งหมดไปยังวงจรจ่ายไฟสำรองขึ้นอยู่กับตัวควบคุม PWM ความถูกต้องของการทำงานถูกกำหนดโดยพารามิเตอร์ของการรักษาเสถียรภาพของแรงดันไฟฟ้าทุติยภูมิ อธิบายไว้ข้างต้น (ดูด้านบน) หลักการทั่วไป การปรับความกว้างพัลส์และการใช้งานในการเปลี่ยนอุปกรณ์จ่ายไฟสำรอง ส่วนนี้จะพิจารณาการนำหลักการนี้ไปปฏิบัติจริงโดยใช้ตัวอย่างน้ำตกพิเศษที่ออกแบบมาเพื่อควบคุมการทำงานของแหล่งพลังงาน ตัวอย่างเช่น ในคอมพิวเตอร์ บนเศษชิ้นส่วน แผนภาพแสดงในรูปที่ 100 โหนดที่สร้างจากองค์ประกอบที่ใช้งานต่อไปนี้เกี่ยวข้องโดยตรงกับขั้นตอนตัวแปลง PWM:
· IC IC ประเภท TL494 - ตัวแปลง PWM สายโซ่ขององค์ประกอบแบบพาสซีฟที่เชื่อมต่อกับไมโครเซอร์กิตตั้งค่าพารามิเตอร์ไดนามิกของการทำงานและยัง ส่วนประกอบเซ็นเซอร์สำหรับตรวจสอบระดับของแรงดันไฟฟ้าทุติยภูมิ
กลุ่มขององค์ประกอบบนทรานซิสเตอร์และหม้อแปลงที่เข้าชุดกัน โทรทัศน์ 2 สร้างด่านจับคู่ระดับและพลัง สัญญาณชีพจรระหว่างเอาต์พุตของตัวแปลง PWM และวงจรอินพุตของเพาเวอร์แอมป์
· มีการติดตั้งโหนดบนทรานซิสเตอร์อื่นสำหรับตัวควบคุม PWM เพื่อรับสัญญาณเกี่ยวกับการเพิ่มขึ้นหรือลดลงในระดับแรงดันไฟฟ้ารองที่ไม่สามารถควบคุมได้ มันยังใช้เพื่อป้องกันวงจรทุติยภูมิ
จากช่วงเวลาที่แรงดันไฟฟ้าถูกนำไปใช้กับพิน 12 เทียบกับพิน 7 ตัวควบคุม PWM จะเริ่มสร้างสัญญาณพัลส์บนหน้าสัมผัสเอาต์พุต (เอาต์พุตของตัวสะสมและตัวปล่อยของทรานซิสเตอร์ VT1 และ VT2) อย่างเป็นทางการ ไม่จำเป็นต้องมีสัญญาณตอบรับเพื่อรับพัลส์เทรนที่พินเหล่านี้ แต่องค์ประกอบแบบพาสซีฟจะต้องเชื่อมต่อกับไมโครเซอร์กิตซึ่งตั้งค่าพารามิเตอร์ของเครื่องกำเนิดและให้อคติที่อินพุตของแอมพลิฟายเออร์ในการดำเนินงาน ในการสังเกตพัลส์ที่ขั้วของทรานซิสเตอร์เอาท์พุท จะต้องติดตั้งตัวต้านทานโหลดเพิ่มเติมในวงจร ซึ่งจะกำหนดวงจรสำหรับการเชื่อมต่อ
พิจารณาวงจรสวิตชิ่งของตัวแปลง PWM ในระบบควบคุมของแหล่งจ่ายไฟสลับโดยใช้การกำหนดบนไดอะแกรมการทำงาน (รูปที่ 99) และหลักการ (รูปที่ 100)
เมื่อแรงดันจ่ายถูกนำไปใช้กับอินพุตของแหล่งสวิตชิ่ง แหล่งจ่ายเสริมจะสร้างแรงดันไฟฟ้าสอง Uadop1 และ Uadop2 อย่างแรกมีไว้สำหรับจ่ายไฟให้กับโคลงของช่องสัญญาณสแตนด์บาย (ถ้าจำเป็น) และอันที่สองสำหรับการจ่ายแรงดันไฟ DC ให้กับไมโครเซอร์กิต PWM โคลง ตัวแปลง PWM ใช้พลังงานจากแรงดันไฟฟ้า ซึ่งแยกทางไฟฟ้าจากเครือข่ายแหล่งจ่ายไฟหลัก
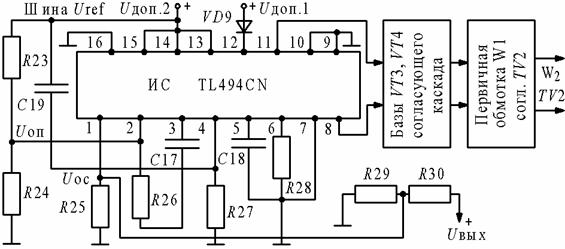
แรงดันไฟฟ้าที่จ่ายให้กับพิน 12 (รูปที่ 101) ของชิป IC จากวงจรเรียงกระแสถึง VD 9 ไม่เสถียรและทำหน้าที่ในการเริ่มต้นใช้งานครั้งแรกของไมโครเซอร์กิตนี้ ในการสร้างแรงดันไฟฟ้าแบบฟันเลื่อย เครื่องกำเนิดภายในของไมโครเซอร์กิต IC ระหว่างพิน 6 กับสายสามัญของแรงดันไฟฟ้าทุติยภูมิจะเชื่อมต่อกับตัวต้านทาน R28 ที่มีค่าความต้านทานเล็กน้อย เช่น 12 kΩ และตัวเก็บประจุ C18 ที่มีความจุ ของตัวอย่างเช่น 1500 pF เชื่อมต่อระหว่างสายสามัญและขั้ว IC 5 (รูปที่ 100) ตามเอกสารประกอบการบริการสำหรับไมโครเซอร์กิต TL494 การคำนวณความถี่ในการสร้างที่สัมพันธ์กับองค์ประกอบของแผนภาพวงจรนี้ สามารถทำได้ตามสูตรต่อไปนี้:
ด้วยค่าที่ระบุขององค์ประกอบของโซ่ RC ความถี่ของเครื่องกำเนิดคือ ~ 55.5 kHz เครื่องกำเนิดไฟฟ้าภายในสร้างสัญญาณด้วยแรงดันไฟฟ้าที่เพิ่มขึ้นซึ่งรูปร่างจะแสดงในแผนภาพด้านบนในรูปที่ 101
ตามเอกสารทางเทคนิคสำหรับไมโครเซอร์กิต TL494 แรงดันไฟฟ้าที่เพิ่มขึ้นถึงระดับ +3.2 V หลังจากนั้นตัวเก็บประจุจะถูกปล่อยออกและแรงดันฟันเลื่อย U 5 บนนั้นลดลงอย่างกะทันหันเป็นศูนย์ จากนั้นกระบวนการจะทำซ้ำเป็นวงกลม (ดูไดอะแกรมในรูปที่ 101) ประเภทของสัญญาณมีลักษณะเชิงคุณภาพและไม่ได้สะท้อนถึงความสัมพันธ์แบบเรียลไทม์และแอมพลิจูด
แรงดันฟันเลื่อยถูกนำไปใช้กับอินพุตที่กลับด้านของตัวเปรียบเทียบ "dead zone" - องค์ประกอบ DA1 และตัวเปรียบเทียบ PWM - องค์ประกอบ DA2 แหล่งภายในของอคติเริ่มต้นเชื่อมต่อกับอินพุตที่สองของตัวเปรียบเทียบซึ่งค่าที่ได้ ถูกตั้งค่าและเป็น U 4 = 100 mV
แผนภาพ 1 รูปที่ 101 การมีอยู่ของแหล่งกำเนิดนี้แสดงให้เห็นตามอัตภาพโดยเส้นตรงที่ตัดกับ "ฟัน" ของแรงดันฟันเลื่อย ตัวเปรียบเทียบเป็นอุปกรณ์ที่มีขีด จำกัด ดังนั้นจึงสร้างสัญญาณที่เอาต์พุตซึ่งค่าที่ใช้เพียงสองสถานะเท่านั้น หากแรงดันไฟฟ้าที่อินพุทอินพุทสูงกว่าระดับแรงดันไฟฟ้าที่อินพุทที่ไม่กลับด้าน แรงดันไฟฟ้าต่ำจะถูกตั้งค่าที่เอาต์พุตของตัวเปรียบเทียบ ในกรณีนี้คือศูนย์ ในทางกลับกัน หากแรงดันไฟฟ้าที่อินพุทกลับด้านน้อยกว่าที่อินพุทที่ไม่กลับด้าน แรงดันไฟขาออกจะใช้ค่าระดับสูงใกล้กับระดับการจ่าย ในกรณีของเรา เมื่อแรงดันไฟฟ้าของอคติเริ่มต้นที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 มากกว่าแรงดันของเครื่องกำเนิดฟันเลื่อยที่ใช้กับอินพุตที่สอง แรงดันเอาต์พุต (แผนภาพ 2 ในรูปที่ 101) มีค่าสูง ระดับ. องค์ประกอบที่ไม่ต่อเนื่องของน้ำตกเชื่อมต่อกับอินพุตของ IC 4 เท่านั้นที่มีแรงดันไฟบวก ออฟเซ็ตที่อินพุตไม่กลับด้าน DA1 100 mV นั้นน้อยที่สุด และการเพิ่มแรงดันไฟฟ้าที่ IC 4 สามารถเพิ่มได้เท่านั้น ดังนั้นเราจึงสรุปได้ว่าระยะเวลาของพัลส์ที่สร้างขึ้นที่เอาต์พุตของ DA1 ที่ออฟเซ็ตเริ่มต้นที่กำหนด มีค่าต่ำสุดและการเพิ่มขึ้นของแรงดันไฟฟ้าที่เอาต์พุตของ IC 4 ระยะเวลาของพัลส์ของขั้วบวก จะเพิ่มขึ้นเท่านั้น คุณสมบัตินี้มีผลอย่างไรต่อการทำงานของรูปแบบการควบคุมทั้งหมดจะกล่าวถึงด้านล่าง ลำดับพัลส์เป็นระยะจากเอาต์พุตของตัวเปรียบเทียบ DA1 จะถูกป้อนไปยังองค์ประกอบลอจิกดิจิทัลของประเภท OR - DD1 อัตราการทำซ้ำของพัลส์ถูกกำหนดโดยลักษณะเวลาของแรงดันฟันเลื่อย
รูปที่ 3 101 แสดงแรงดันฟันเลื่อยและแรงดันป้อนกลับ U 3 ซึ่งสามารถเปลี่ยนแปลงได้ ขึ้นอยู่กับการกระทำของปัจจัยที่ไม่เสถียร (รูปที่ 100)
แอมพลิฟายเออร์ข้อผิดพลาดบนองค์ประกอบ DA3 เปรียบเทียบแรงดันป้อนกลับและแรงดันอ้างอิง ระดับหลังถูกกำหนดโดยอัตราส่วนของตัวต้านทาน R23 และ R24 ที่เชื่อมต่อระหว่างพิน IC 14 และสายสามัญ 100. สเตจภายในของวงจร IC สร้างแรงดันไฟฟ้าที่เสถียรโดยมีค่าเล็กน้อยที่ +5 V ที่ขา IC 14 ตัวต้านทาน R23 และ R24 จะสร้างตัวแบ่งแรงดันซึ่งจุดกึ่งกลางซึ่งเชื่อมต่อผ่านพิน IC 2 กับอินเวอร์เตอร์ อินพุตของเครื่องขยายเสียงปฏิบัติการ DA3 อินพุต DA3 ที่ไม่กลับด้านผ่านตัวต้านทานสองตัว R29 และ R30 ได้รับแรงดันไฟฟ้าจากเอาต์พุตของช่องสัญญาณแรงดันไฟทุติยภูมิด้วยค่าเช่น +5 V อินพุต ИС 1 เชื่อมต่อผ่านตัวต้านทาน R25 กับสายสามัญของสายทุติยภูมิ แหล่งจ่ายไฟ ค่าความต้านทานของตัวต้านทาน R25 และ R29, R30 ซึ่งเป็นตัวแบ่งจะถูกเลือกในลักษณะที่แรงดันไฟฟ้ารองเอาต์พุตที่เอาต์พุตของ IC 1 ตั้งค่าแรงดันไฟฟ้า ต่ำกว่าค่า +2.5 V เล็กน้อย ซึ่งสร้างออฟเซ็ตส่วนต่างเริ่มต้นที่อินพุตของ DA3 แอมพลิฟายเออร์ DA3 ทำงานในโหมดเชิงเส้น พารามิเตอร์เกนถูกกำหนดโดยวงจรภายในของสเตจนี้ DA3 ใช้พลังงานจากแหล่งภายในเท่านั้นด้วย ค่าบวกแรงดันไฟฟ้า. ดังนั้น การเปลี่ยนแปลงของแรงดันไฟขาออกบน DA3 สามารถเกิดขึ้นได้ในพื้นที่บวกเท่านั้น เพื่อให้เป็นไปตามเงื่อนไขนี้ แรงดันไฟฟ้าที่เอาต์พุตของ IC 1 ไม่ควรเกิน +2.5 V การเกินเกณฑ์นี้จะนำไปสู่การตั้งค่าแรงดันไฟฟ้าที่มีค่าเป็นศูนย์ที่เอาต์พุตของ DA3 นอกจากนี้ เราจะถือว่าสิ่งนี้ไม่เกิดขึ้น และวงจรทำงานในช่วงที่กำหนดไว้สำหรับโซนการปรับ
ดังนั้นที่อินพุตของ IS 2 แรงดันไฟฟ้าจะคงที่ และที่อินพุตของ IS 1 แรงดันป้อนกลับจะถูกจ่ายจากโหลด ซึ่งมีค่าเบี่ยงเบนที่กำหนดโดยปัจจัยรบกวน ที่เอาต์พุตของแอมพลิฟายเออร์ DA3 จะเกิดสัญญาณที่ไม่ตรงกันหรือข้อผิดพลาดซึ่งกำหนดโดยพารามิเตอร์ความเสถียรของแหล่งแรงดันอ้างอิงภายในของไมโครวงจร IC เป็นที่ชัดเจนว่าการเบี่ยงเบนทั้งหมดจากค่าเล็กน้อยจะถูกส่งไปยัง IS 2 เอาต์พุต DA3 เชื่อมต่อกับอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM - DA2 แรงดันฟันเลื่อยจากเครื่องกำเนิดไฟฟ้าจะถูกป้อนไปยังอินพุตที่สอง รูปคลื่นของสัญญาณต่างๆ ที่อินพุต DA2 แสดงในแผนภาพ 3 ดังแสดงในรูปที่ 101 เส้นที่ข้าม "เลื่อย" แสดงแรงดันไฟฟ้าที่อินพุต DA2 ที่ไม่กลับด้าน รูปร่างสัญญาณผลลัพธ์ที่เอาต์พุตของ DA2 จะแสดงในแผนภาพ 4 (ดูรูปที่ 101) จะเห็นได้ว่าพัลส์ของขั้วบวกเกิดขึ้นที่นี่ในกรณีที่ระดับของแรงดันไฟฟ้าที่จ่ายจากเอาต์พุตของ DA3 เกินระดับของแรงดันไฟฟ้าที่เพิ่มขึ้นเชิงเส้นตรงที่อินพุตกลับด้านของ DA2 แผนภาพ 4 แสดงให้เห็นว่าระยะเวลาของพัลส์บวกเปลี่ยนแปลงไปอย่างไร และดังนั้น การหยุดชั่วคราวระหว่างพัลส์ทั้งสองจึงขึ้นอยู่กับรูปคลื่นของแรงดันไฟฟ้าที่เอาต์พุตของ DA3 ระยะเวลาของพัลส์บวกจะเพิ่มขึ้นเมื่อระดับที่เอาต์พุตของ DA3 เพิ่มขึ้น กล่าวคือ ระยะเวลาพัลส์เป็นสัดส่วนโดยตรงกับระดับแรงดันไฟฟ้าที่เอาต์พุตของแอมพลิฟายเออร์ที่ไม่ตรงกัน
ลำดับของพัลส์จะถูกป้อนไปยังอินพุตที่สองขององค์ประกอบดิจิทัล DD1 อินพุตแรกที่รับสัญญาณพัลส์จากเอาต์พุตของ DA1 - ตัวเปรียบเทียบของ "โซนตาย"
องค์ประกอบของไมโครเซอร์กิต IC ซึ่งทำงานตามที่อธิบายไว้ข้างต้น รวมอยู่ในส่วนแอนะล็อกของการประมวลผลและการสร้างสัญญาณ ควรสังเกตว่าเครื่องเปรียบเทียบอยู่ในตำแหน่งแนวเขตที่นี่ รับสัญญาณแอนะล็อกที่อินพุท จะสร้างสัญญาณสองระดับที่เอาท์พุต ส่วนประกอบด้วย การกำหนดตัวอักษร DD เกี่ยวข้องกับองค์ประกอบของระบบอัตโนมัติแบบดิจิทัลโดยเฉพาะ ซึ่งทำงานด้วยสัญญาณแบบไม่ต่อเนื่องทั้งที่อินพุตและเอาต์พุต สัญญาณมีเพียงสองระดับ ในตรรกะเชิงบวก (เราจะปฏิบัติตามคำศัพท์นี้ต่อไป) หน่วยลอจิคัลถือเป็นค่าแรงดันไฟฟ้าที่ใกล้เคียงกับระดับของแหล่งจ่ายไฟบวก ระดับศูนย์ตรรกะเป็นระดับต่ำ ใกล้กับศักยภาพของสายสามัญ
สถานะเอาต์พุตขององค์ประกอบ DD1 หรือแบบลอจิคัล OR รับค่าของหน่วยลอจิคัลก็ต่อเมื่ออินพุตอย่างน้อยหนึ่งรายการ (โดยพลการ) สัญญาณก็มีระดับลอจิกสูงเช่นกัน เอาต์พุตจะถือว่าอยู่ในสถานะระดับต่ำเมื่อแรงดันไฟฟ้าในระดับต่ำยังถูกนำไปใช้กับอินพุตทั้งหมดของเกต OR
ประเภทของสัญญาณเอาท์พุตพัลส์ขององค์ประกอบ DD1 แสดงในแผนภาพ 5 ลำดับที่ได้รับที่เอาต์พุต DD1 เป็นพื้นฐานสำหรับการก่อตัวของการควบคุมขั้นสุดท้ายบน องค์ประกอบพลังงานเพาเวอร์แอมป์ ความสัมพันธ์ตลอดเวลาของสัญญาณสุดท้ายรวมอยู่ในลำดับเริ่มต้นนี้แล้ว เอาต์พุตของ DD1 เชื่อมต่อกับอินพุตการนับ C ของทริกเกอร์ไดนามิก - DD2 เช่นเดียวกับอินพุตขององค์ประกอบตรรกะ DD5 และ DD6 แต่ละรายการ
สถานะของเอาท์พุตของทริกเกอร์ไดนามิกจะเปลี่ยนแปลงเมื่อมาถึงขอบบวกของพัลส์ที่อินพุตตัวนับ ในขณะนี้ สถานะของอินพุตข้อมูล พิน D ถูก "เขียนทับ" (ซ้ำ) ไปยังเอาต์พุตโดยตรงของทริกเกอร์ - พิน Q เอาต์พุต (-Q) มีสถานะตรงข้ามกับ Q เสมอ (แผนภาพ 6 และ 7) .
แผนภาพการทำงานที่แสดงในรูปที่ 99 แสดงให้เห็นว่าไดนามิกทริกเกอร์ DD2 (D-flip-flop) มีการเชื่อมต่อเอาต์พุตผกผันกับอินพุตข้อมูล - D การเชื่อมต่อทริกเกอร์ดังกล่าวกำหนดให้โหมดการแบ่งความถี่ของลำดับพัลส์ ป้อนอินพุตการนับเป็นสอง ... ทริกเกอร์ถูกทริกเกอร์ นั่นคือ การเปลี่ยนแปลงในสถานะของเอาต์พุตพาราเฟส เกิดขึ้นเมื่อขอบบวกของพัลส์มาถึงอินพุต C เท่านั้น ในเวลานี้ การออกแต่ละครั้งจะเปลี่ยนสถานะเป็นตรงกันข้าม พิน Q และ D เชื่อมต่อกัน ดังนั้นการเปลี่ยนแปลงใดๆ ในสถานะของเอาต์พุต Q จะถูกส่งไปยังอินพุต D ดังนั้น แต่ละขอบที่มาถึงอินพุต C จะเขียนทับระดับที่เปลี่ยนแปลงของอินพุต D ไปยังเอาต์พุต ระหว่างการมาถึงของสองขอบ สถานะของเอาต์พุตทริกเกอร์ยังคงเสถียรดังแสดงในแผนภาพ 7 และ 6 (ดูรูปที่ 101) แผนภาพ 7 สอดคล้องกับสถานะของเอาต์พุตโดยตรงของ flip-flop - พิน Q และไดอะแกรม 6 - ต่อการเปลี่ยนแปลงในสถานะของเอาต์พุตผกผัน - พิน (-Q) ทริกเกอร์เปิดอยู่ที่ขอบบวกของแผนภาพลำดับ 4
กระบวนการแบ่งความถี่ดั้งเดิมแบบดิจิทัลด้วยสองวิธี คุณสมบัติที่สำคัญ: โดยไม่คำนึงถึงประเภท (จังหวะของพัลส์และการหยุดชั่วคราว) ของสัญญาณพัลส์อินพุต ในลำดับที่ได้รับจากการหาร ระยะเวลาพัลส์และหยุดชั่วคราวจะเท่ากัน (ดูแผนภาพ 7 และ 6 ในรูปที่ 101)
เอาต์พุต Q ของ DD2 ของ flip-flop เชื่อมต่อกับอินพุตหนึ่งขององค์ประกอบ DD3 และเอาต์พุตผกผัน (-Q) เชื่อมต่อกับอินพุตหนึ่งขององค์ประกอบลอจิก DD4 องค์ประกอบสองอินพุต DD3 และ DD4 ทำหน้าที่ของตรรกะ AND องค์ประกอบของประเภทนี้สร้างสัญญาณระดับตรรกะสูงที่พินเอาต์พุตเมื่ออินพุตทั้งหมดมีระดับสูงเช่นกัน ด้วยการรวมกันของระดับตรรกะอื่น ๆ ที่อินพุตขององค์ประกอบ AND เอาต์พุตจะยังคงต่ำ อินพุตทั้งหมดขององค์ประกอบลอจิกมีผลเช่นเดียวกันกับการก่อตัวของสัญญาณเอาต์พุตนั่นคือมีค่าเท่ากัน หากระดับลอจิกสูงถูกนำไปใช้กับอินพุตตัวใดตัวหนึ่งอย่างต่อเนื่อง แสดงว่าเปิดใช้งานได้และจะไม่ส่งผลต่อการผ่านองค์ประกอบสัญญาณจากอินพุตที่สอง มิฉะนั้น การเปลี่ยนแปลงทั้งหมดของสัญญาณที่ตั้งไว้ที่อินพุตที่สองจะถูกทำซ้ำทุกประการที่เอาต์พุต
ในรูปที่ 100 เอาต์พุตของวงจรไมโคร IC 13 เชื่อมต่อกับอินพุตหนึ่งขององค์ประกอบ DD3 และ DD4 และสามารถใช้เพื่อป้องกันสัญญาณพัลส์ที่มาถึงองค์ประกอบ DD3 และ DD4 จากเอาต์พุตทริกเกอร์ DD2 การบล็อกจะดำเนินการโดยใช้สัญญาณระดับลอจิกต่ำกับพินนี้ ในแผนผังนี้, รูปที่ 100. เอาต์พุต IC 13 เชื่อมต่อกับ IC 14 อย่างถาวร - เอาต์พุตของแหล่งแรงดันอ้างอิงภายใน ศักยภาพนี้คือความละเอียดคงที่สำหรับการส่งผ่านลำดับจากเอาต์พุตฟลิปฟล็อปไปยังเอาต์พุต DD3 และ DD4 ดังนั้นรูปคลื่นของแรงดันไฟฟ้าที่อินพุตและเอาต์พุตขององค์ประกอบตามลำดับ DD3 และ DD4 จะเหมือนกัน (แผนภาพ 9 และ 8 (ดูรูปที่ 101)ในกรณีนี้ องค์ประกอบเหล่านี้ทำหน้าที่เป็นบัฟเฟอร์และตัวทำซ้ำ
องค์ประกอบสุดท้ายที่ติดตั้งในวงจรสร้างสัญญาณ PWM คือองค์ประกอบสองอินพุต DD5 และ DD6 อินพุตหนึ่งขององค์ประกอบเหล่านี้เชื่อมต่อกับ DD3 และ DD4 ตามลำดับ และอินพุตอีกคู่ขององค์ประกอบ DD5 และ DD6 จะถูกรวมเข้าด้วยกันและเชื่อมต่อกับเอาต์พุตของ DD1 องค์ประกอบ DD5 และ DD6 ใช้เพื่อดำเนินการฟังก์ชันตรรกะของประเภท OR-NOT องค์ประกอบเหล่านี้ดำเนินการทางตรรกะคล้ายกับ DD1 แต่ยังเพิ่มการปฏิเสธซึ่งในเทคโนโลยีดิจิทัลจะเทียบเท่ากับการผกผัน สัญญาณระดับต่ำจะปรากฏขึ้นที่เอาต์พุตของเกท OR-NOT เมื่อมีการตั้งค่าแรงดันไฟฟ้าระดับสูงอย่างน้อยหนึ่งอินพุต หากองค์ประกอบ OR สองอินพุต (OR-NOT) เราแนะนำความแตกต่างที่เป็นนามธรรมระหว่างอินพุตและอีกอันหนึ่งถือเป็นข้อมูล และส่วนที่สองอนุญาต เราสามารถสรุปได้ว่าสำหรับการส่งข้อมูลจากอินพุตแรกไปยัง เอาต์พุตขององค์ประกอบที่อินพุตการอนุญาตจะต้องมีระดับแรงดันไฟฟ้าตั้งไว้ที่ต่ำ เมื่อใช้ระดับสูงกับอินพุตที่เปิดใช้งาน ข้อมูลจะถูกบล็อก และระดับต่ำจะแสดงที่เอาต์พุตอย่างต่อเนื่อง สิ่งนี้เป็นจริงสำหรับตรรกะขององค์ประกอบของประเภท OR-NOT
ที่อินพุต DD5 สัญญาณที่มาจากเอาต์พุต DD1 จะทำงาน (ดูแผนภาพ 4 ในรูปที่ 101 และ DD3 (ดูแผนภาพ 7) อันเป็นผลมาจากการเพิ่มตรรกะของอินพุตเหล่านี้ส่งผลต่อการผกผันที่เอาต์พุตขององค์ประกอบ DD5 , สัญญาณที่แสดงในแผนภาพ 8 ปรากฏขึ้น แผนภาพที่ 9 แสดงรูปร่างของพัลส์ที่ได้รับที่เอาต์พุตขององค์ประกอบ DD6 พัลส์ของขั้วบวกมาถึงเอาต์พุต DD5 และ DD6 เมื่อสัญญาณอินพุตทั้งสองสำหรับแต่ละองค์ประกอบเหล่านี้อยู่ในระดับต่ำ ค่า.
แผนภาพที่ 4, 8 และ 9 แสดงว่าที่เอาต์พุตของ DD5 และ DD6 พัลส์สลับของลำดับของแผนภาพ 4 ปรากฏขึ้น พัลส์ที่ทำงานในแผนภาพ 4 จะถือเป็นช่วงเวลาซึ่งขอบเขตของการล่มสลายและด้านหน้าคือจุดเริ่มต้นของพัลส์คือการลดลงของ แรงดันบวกและจุดสิ้นสุดของมันคือขอบบวก หนึ่งพัลส์จากเอาต์พุต DD1 จะถูกป้อนไปยังเอาต์พุตขององค์ประกอบ DD5 และสัญญาณอินพุตไปยัง DD6 ถูกบล็อกในขณะนี้ ระดับสูงมาจากเอาต์พุตกลับด้านของ flip-flop DD2 พัลส์ถัดไปจากลำดับที่เอาต์พุต DD1 ปรากฏขึ้นที่เอาต์พุต DD6 แล้ว และใน DD5 นั้นจะถูกบล็อกโดยระดับสูงที่มาจากเอาต์พุตโดยตรงของทริกเกอร์ DD2 ที่เอาต์พุตของแต่ละองค์ประกอบทางลอจิคัล DD5 และ DD6 พัลส์ปรากฏขึ้นสลับกันจากลำดับที่เกิดขึ้นที่เอาต์พุตของ DD1
ที่เอาต์พุต DD5 และ DD6 จะมีการสร้างพัลส์เทรนสองตัว อัตราการเกิดซ้ำของพัลส์ในแต่ละรายการนั้นต่ำกว่าความถี่ของแรงดันฟันเลื่อยทั่วตัวเก็บประจุ C18 ถึงสองเท่า พัลส์ขั้วบวกของทั้งสองลำดับมีระยะห่างกัน กล่าวคือ ช่วงการดำเนินการไม่ทับซ้อนกัน นอกจากนี้ แต่ละซีเควนซ์ยังใช้เพื่อควบคุมทรานซิสเตอร์ของตัวเองของแอมพลิฟายเออร์สวิตชิ่งแบบฮาล์ฟบริดจ์ ปัญหาของการสร้างลำดับพัลส์ที่ถูกต้องสำหรับการกระตุ้นนั้นค่อนข้างสำคัญ วงจรทรานซิสเตอร์เพาเวอร์แอมป์ดังนั้นจึงจำเป็นต้องพิจารณาบางกรณีขอบเขตของการทำงานของวงจรจ่ายไฟและการตอบสนองต่อองค์ประกอบของไมโครวงจร IC
ตำแหน่งชั่วขณะของพัลส์ถูกกำหนดอย่างเข้มงวดโดยรูปร่างของแรงดันฟันเลื่อย ความชันของพัลส์ในแต่ละลำดับจะซิงโครไนซ์กับความชันของแรงดันทางลาดที่สร้างโดยเครื่องกำเนิดไมโครเซอร์กิต ตำแหน่งเวลาของการตกจะไม่เปลี่ยนแปลง หากเราดูแผนภาพ 3 เราจะสังเกตได้ว่าตำแหน่งของการสลายตัวของพัลส์ที่สร้างโดยตัวเปรียบเทียบ PWM (ดูแผนภาพ 4) ขึ้นอยู่กับอัตราส่วนกระแสของแรงดัน "เลื่อย" และแรงดันไฟที่ไม่ตรงกัน การลดระดับของแรงดันไฟฟ้าที่ไม่ตรงกันในแผนภาพ 4 ทำให้เกิด "การเปลี่ยนแปลง" ของจุดเริ่มต้นของพัลส์ไปทางซ้าย ตำแหน่งของด้านหน้าของพัลส์นี้ซึ่งก็คือจุดสิ้นสุดนั้นถูกกำหนดอย่างเข้มงวดโดยช่วงเวลาที่แรงดันฟันเลื่อยลดลงดังนั้นระยะเวลาจะเพิ่มขึ้น ความถี่ของพัลส์ไม่เปลี่ยนแปลง และระยะเวลาของพัลส์จะถูกควบคุมโดยระดับเอาต์พุตของแอมพลิฟายเออร์ที่ไม่ตรงกัน DA3
ที่จุดเริ่มต้นของคำอธิบายของการทำงานของตัวแปลง PWM มีการกล่าวถึงตัวเปรียบเทียบ "โซนตาย" (ดูแผนภาพ 1 และ 2) ตอนนี้มันชัดเจนแล้ว กลไกทั่วไปการทำงานของวงจรทั้งหมดของโมดูเลเตอร์ความกว้างพัลส์ควรอธิบายความจำเป็นในการมีอยู่ในวงจรประเภทนี้
บนองค์ประกอบ DD1 จะมีการเติมสัญญาณพัลส์แบบลอจิคัลจากตัวเปรียบเทียบ DA1 และ DA2 ก่อนหน้านี้ สันนิษฐานว่าพัลส์บวกของตัวเปรียบเทียบ DA2 นั้นกว้างกว่าพัลส์เอาต์พุตที่คล้ายคลึงกันจาก DA1 อย่างไรก็ตาม หากกระบวนการของพัลส์แคบลงจาก DA2 เริ่มต้นขึ้น ที่ ระดับศูนย์สัญญาณจาก DA1 ในกรณีสุดขั้วที่เอาต์พุต DD1 จะสร้างระดับต่ำคงที่ Flip-flop DD2 จะไม่สามารถสลับเอาท์พุตได้ และระดับลอจิกที่ตรงกันข้ามคงที่จะปรากฏบน DD5 และ DD6 สิ่งนี้จะหยุดกระบวนการเปลี่ยนของทรานซิสเตอร์สเตจกำลัง เพื่อป้องกันเหตุการณ์ สถานการณ์ที่คล้ายคลึงกันมีวัตถุประสงค์เพื่อเปรียบเทียบ "เดดโซน" ด้วยการตีบของพัลส์จาก DA2 ช่วงเวลาหนึ่งเกิดขึ้นเมื่อระยะเวลาของพัลส์บวกจาก DA1 กลายเป็นปัจจัยชี้ขาดเมื่อมีการเพิ่มสัญญาณที่มาถึงอินพุต DD1 พัลส์บวกที่เอาต์พุตของ DD1 ไม่สามารถ "แคบกว่าพัลส์เอาต์พุตของตัวเปรียบเทียบ" โซนตาย " ซึ่งระยะเวลาจะตรงกับการหยุดชั่วคราว (ศูนย์ตรรกะ) ในแผนภาพ 2 การหยุดชั่วคราวระหว่างพัลส์เหล่านี้จะเท่ากับ ระยะเวลาของพัลส์บวกในแผนภาพ 2 ซึ่งหมายความว่าโหนดบนตัวเปรียบเทียบของ "โซนตาย" รับประกันเพื่อให้แน่ใจว่าลักษณะของตัวแปลงลำดับในขั้นตอนเอาต์พุตของพัลส์ PWM พร้อมช่วงเวลาหยุดชั่วคราวระหว่างพัลส์ที่ระบุกลไกนี้ ของการกระทำช่วยให้คุณเพิ่มการไหลของพลังงานไปยังวงจรทุติยภูมิและดำเนินการตามขั้นตอนของการควบคุม PWM ต่อโดยใช้แอมพลิฟายเออร์ DA3 และตัวเปรียบเทียบ DA2 ทรานซิสเตอร์กำลังของเพาเวอร์แอมป์
การปรากฏตัวของสัญญาณพัลส์ที่เอาต์พุตขององค์ประกอบ DD5 และ DD6 สิ้นสุดการประมวลผลเชิงตรรกะของสัญญาณผิดพลาดและการก่อตัวของลำดับ PWM ในตัวแปลง ลักษณะของพัลส์เทรนเหล่านี้จะไม่เปลี่ยนแปลงจนกว่าจะนำไปใช้กับองค์ประกอบกำลังของเพาเวอร์แอมป์ ทุกขั้นตอนที่ติดตั้งระหว่างเอาต์พุตขององค์ประกอบ DD5, DD6 และวงจรฐานของทรานซิสเตอร์เครื่องขยายเสียงมีจุดประสงค์เพื่อเพิ่มลักษณะพลังงานของพัลส์ควบคุมและเพื่อให้ตรงกับระดับเท่านั้น
ทรานซิสเตอร์ภายใน VT1 และ VT2 ของชิป IC ใช้สำหรับการขยายหลักของลำดับการควบคุมของพัลส์ที่ป้อนไปยังฐาน (ดูแผนภาพ 10 และ 11, รูปที่ 101) จากองค์ประกอบ DD5 และ DD6 ขั้วของทรานซิสเตอร์เหล่านี้ไม่มี การเชื่อมต่อภายในกับวงจรต้านทานโหลดใดๆ พวกมันถูกปล่อยให้เป็นอิสระเป็นพิเศษสำหรับการใช้ทรานซิสเตอร์ใน ตัวเลือกต่างๆแผนการรวม
ไม่ค่อยได้ใช้การเชื่อมต่อโดยตรงของทรานซิสเตอร์เอาท์พุต TL494 กับหม้อแปลงไฟฟ้ากำลัง โดยปกติ ขั้นตอนการขยายเสียงระดับกลางจะใช้ทรานซิสเตอร์ เช่น ประเภท 2SC945 ในกรณีนี้อีซีแอลของทรานซิสเตอร์ VT1 และ VT2 ของไมโครเซอร์กิต (9,10) เชื่อมต่อกันและตัวสะสม (8 และ 11) มีการเชื่อมต่อหม้อแปลงกับเพาเวอร์แอมป์ นี่เป็นแนวทางดั้งเดิมในการสร้างวงจรที่ตรงกันของชุดควบคุมแรงดันต่ำ พลังงานค่อนข้างต่ำ และสเตจกำลังไฟฟ้าแรงสูง การดำเนินการตามแนวทางนี้มีดังต่อไปนี้ พัลส์แรงดันไฟฟ้าของรูปสี่เหลี่ยมผืนผ้า (ดูแผนภาพ 12.13, รูปที่ 101) บนตัวสะสมของทรานซิสเตอร์ VT1 และ VT2 จะถูกป้อนไปยังฐานของทรานซิสเตอร์สองตัว (ไม่แสดงในรูปที่ 100) ซึ่งรวมตัวสะสมและตัวปล่อย ในขดลวดปฐมภูมิ (วงจรที่มีจุดกึ่งกลาง ) หม้อแปลงไฟฟ้าความถี่สูงที่จับคู่กำลังต่ำ TV2 พัลส์แรงดันไฟฟ้าของรูปสี่เหลี่ยมผืนผ้าจากขดลวดทุติยภูมิของหม้อแปลงนี้ถูกป้อนไปยังอินพุตของทรานซิสเตอร์ที่ทรงพลังซึ่งรวมอยู่ในขดลวดหลักของหม้อแปลงไฟฟ้า TV1 (วงจรจุดกึ่งกลาง) จากขดลวดทุติยภูมิที่แรงดันไหลผ่านวงจรเรียงกระแส (s) และการปรับให้เรียบ ( f) ตัวกรอง (s) ให้กับผู้ใช้พลังงานไฟฟ้า
ดังนั้นระยะที่พิจารณาจะทำหน้าที่ขยายระดับและกำลังของสัญญาณพัลส์ของไอซี (แผนภาพ 12, 13, รูปที่ 101) ให้อยู่ในระดับที่เพียงพอสำหรับเริ่มแอมพลิฟายเออร์ฮาล์ฟบริดจ์ (หรือทำตามแบบแผนอื่น) และ รักษาแรงดันไฟฟ้าให้กับผู้บริโภคภายในที่กำหนดโดยปัจจัยที่รบกวน
ใน IVEP แบบพัลซิ่ง ทรานซิสเตอร์ประเภท 2SC945 หรือแอนะล็อกที่ใช้งานได้มักจะรวมอยู่ในขดลวดหลักของหม้อแปลงไฟฟ้า TV1 มีการใช้กันอย่างแพร่หลายโดยไม่คำนึงถึงผู้ผลิตผลิตภัณฑ์ ค่าจำกัดวิชาเอก พารามิเตอร์ทางเทคนิคทรานซิสเตอร์เหล่านี้มีดังนี้:
· กำลังกระจายสูงสุด - 250 mW;
แรงดันฐานสะสม - 60 V;
แรงดันไฟสะสม - 50 V;
· แรงดันไฟฐานอีซีแอล - 5 V;
กระแสสะสม - 100 mA;
กระแสฐาน - 20 mA;
· ค่าทั่วไปของเกนในวงจรที่มีอีซีแอลทั่วไป - 185-200;
· ความจุทั่วไปของการเปลี่ยนฐานสะสม - 3 pF;
· ค่าทั่วไปของความถี่เกนเป็นเอกภาพคือ 250 MHz
ตามการจำแนกในประเทศพวกเขาอยู่ในตระกูลทรานซิสเตอร์ ความถี่สูงและพลังงานต่ำ
ปาฏิหาริย์แห่งอัลไต ผู้คนต่างพากันไปตามรีสอร์ทต่างประเทศจนลืมไปว่าประเทศของเราใหญ่กว่ายุโรปทั้งหมด ตัวอย่างเช่นอาณาเขตของ Gorny Altai ซึ่งมีพื้นที่ 9, 2 พัน km2 สามารถรองรับบริเตนใหญ่ได้สิบแห่ง และมีเพียง 200,000 คนเท่านั้นที่อาศัยอยู่ในอาณาเขตของตน ปรากฎว่าสำหรับความลับและความลึกลับนี่คือที่สุด ที่ที่ดีที่สุด... และถ้าคุณรู้สึกอยากสัมผัส ประวัติศาสตร์สมัยโบราณและทำความคุ้นเคยกับความลับที่แท้จริง แล้วคุณจะอยู่ที่นี่ หุบเขาแห่งความตาย ประวัติและ จำนวนมากของพื้นที่ว่างที่ได้รับอนุญาตสำหรับการอนุรักษ์อนุสาวรีย์ที่น่าตื่นตาตื่นใจ ตัวอย่างเช่น ในภูมิภาค Chemal มี "หุบเขาแห่งความตาย" ทั้งหมด ริมฝั่งแม่น้ำ Katun และแม่น้ำสาขามีกองฝังศพ Scythian นับพันแห่ง ซึ่งส่วนใหญ่ยังไม่ได้ขุดค้น นี่เป็นภาพที่น่าตื่นตาตื่นใจ แต่ความทันสมัยกลับเข้ามารบกวนแม้ในที่ที่ดูเหมือนขัดขืนไม่ได้ ในอนาคตอันใกล้นี้ มีการวางแผนที่จะดำเนินการก่อสร้างสถานีไฟฟ้าพลังน้ำ Katunskaya ต่อ อ่างเก็บน้ำที่เกิดขึ้นคุกคามจะท่วมกองจำนวนมาก ดังนั้นตอนนี้นักโบราณคดีชาวรัสเซียและอัลไตจึงพยายามเร่งงานของพวกเขา ความอิ่มตัวของหลุมศพที่มากเกินไปทำให้เกิดการเดามากมายว่าทำไมมีหลุมฝังศพมากมายในอัลไต หนึ่งในนั้นกล่าวว่าดินแดนนี้เป็นบ้านของบรรพบุรุษของมวลมนุษยชาติ นักวิทยาศาสตร์เจียมเนื้อเจียมตัวมากขึ้นยอมรับว่าอัลไตเป็นบ้านของบรรพบุรุษของเผ่าพันธุ์อินโด-ยูโรเปียน มีรุ่นที่เป็นศูนย์กลางของรัฐไซเธียนที่มีอำนาจซึ่งมีพรมแดนถึงแม่น้ำดานูบ มีสิ่งประดิษฐ์มากมายของ "รูปแบบสัตว์" ที่มีชื่อเสียงของ Scythian ย้อนหลังไปถึงศตวรรษที่ 13 ก่อนคริสต์ศักราช - คริสต์ศตวรรษที่ 3 เขาว่ากันว่าดินแดนศักดิ์สิทธิ์ของอัลไต อย่างน่าอัศจรรย์เธอไม่ปล่อยให้ลูกชายของเธอไปและพวกเขานำคนตาย (ที่ใด ๆ ที่ความตายตามทันพวกเขา) มาสู่บ้านเกิดของพวกเขาด้วยมนต์เสน่ห์ของเธอโดยอาศัยเสน่ห์ของเธอ ปาฏิหาริย์ มีคนผีภูเขา ปาฏิหาริย์ พวกเขาอาศัยอยู่นานมาแล้วและมาจากที่ราบเอมอนด์ พวกเขาเป็นเจ้านายของอัลไต การหายตัวไปของพวกเขามีส่วนเกี่ยวข้องกับความขาว ทฤษฎีหนึ่งมีความเกี่ยวข้องในทางใดทางหนึ่ง เบิร์ชสีขาว... ทฤษฎีของ Roerich กล่าวว่าการหายตัวไปของคนเหล่านี้เกี่ยวข้องกับการปรากฏตัวของคนผิวขาว ถูกกล่าวหาว่า Chudi ปฏิเสธที่จะเชื่อฟัง อย่างไรก็ตาม Chudi หายไปและหายไปในลักษณะที่น่าสนใจมาก - พวกเขาฝังตัวเอง: Chudi ขุดหลุมขนาดใหญ่ทำพื้นโลกรองรับ เสาไม้ไปที่นั่นพร้อมกับคนทั้งเผ่าและนำ "หลังคา" ลงมาเอง เมื่อเวลาผ่านไปจะเกิดหลุมรูปกรวยแทนการฝังศพด้วยตนเองซึ่งบางครั้งผู้คนล้มลง มีสมมุติฐานว่าด้วยวิธีนี้คุณชุดีจะลองไปที่อื่น โลกคู่ขนาน... และพวกเขาก็ทำสำเร็จ มีคน (นักปีนเขา, นักปีนหน้าผา) ที่อ้างว่าเคยเห็นสิ่งมีชีวิตบางอย่างคล้ายกับคนที่ออกมาจากโขดหินแล้วกลับไปที่นั่น แม้ว่าการมองเห็นเหล่านี้อาจเป็นผลมาจากการเจ็บป่วยจากระดับความสูง
ข้าว. 40
ข้าว. 39
ข้าว. 38
ข้าว. 37
หมายเหตุ - รายละเอียดเพิ่มเติมเกี่ยวกับไมโครเซอร์กิตและหลักการทำงานของไมโครเซอร์กิตนั้นแสดงเพิ่มเติมในย่อหน้าที่ 2.4.2 - ตัวควบคุม PWM บน IC TL494
การสลับตัวควบคุมแรงดันไฟฟ้าบน IC TL494
แรงดันฟันเลื่อยมักจะได้มาจากอุปกรณ์แยกต่างหาก - เครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (RVG)
กำหนดความถี่ของแรงดันฟันเลื่อย RCโซ่และโดยปกติ NS gpn = คอนสตแต่หากจำเป็นให้เปลี่ยนพารามิเตอร์ RCคุณสามารถตั้งค่า (ปรับ) ความถี่ที่ต้องการได้
เป็นที่ทราบกันดีอยู่แล้วว่าความถี่สวิตชิ่งของอุปกรณ์สวิตชิ่งคือทรานซิสเตอร์ VT 2, VT 3 ใน ISN พร้อม PWM เป็นค่าคงที่ (ถูกกำหนดโดย FPG) ภายใต้อิทธิพลของปัจจัยที่ทำให้ไม่เสถียร แรงดันไฟฟ้าข้ามตัวต้านทานภายนอกจะเปลี่ยนไป NS 9 และดังนั้น ที่เอาต์พุตของแอมพลิฟายเออร์ดิฟเฟอเรนเชียล ยู ypt ซึ่งนำไปสู่การเปลี่ยนแปลงในระยะเวลา เปิดสถานะทรานซิสเตอร์ VT 2, VTตัวควบคุม 3 ตัวและแรงดันไฟฟ้าที่เอาต์พุตของตัวควบคุมการสลับยังคงไม่เปลี่ยนแปลง
3.7.3 ตัวควบคุม PWM TL494 ซีรีส์
ปัจจุบัน ไมโครเซอร์กิต (ในประเทศและนำเข้า) มีวางจำหน่ายทั่วไปในตลาด ซึ่งใช้ชุดฟังก์ชั่นการควบคุม PWM ที่แตกต่างกันสำหรับ งานเฉพาะ... ตัวควบคุม PWM ของซีรีส์ TL494 (อะนาล็อกในประเทศของ KR1114EU4) ได้รับการพิสูจน์แล้วเป็นอย่างดี ของพวกเขา คำอธิบายโดยละเอียดที่กำหนดไว้ใน. ไมโครเซอร์กิตเหล่านี้มีความสามารถขั้นสูงในการพัฒนา IWEP และใช้ฟังก์ชันการควบคุม PWM ครบชุด ไมโครเซอร์กิตดำเนินการสร้างแรงดันอ้างอิง, การขยายสัญญาณผิดพลาด, การก่อตัวของแรงดันฟันเลื่อย, การปรับ PWM, การก่อตัวของเอาต์พุตแบบผลัก, การป้องกันกระแสและการโอเวอร์โหลด, การซิงโครไนซ์ภายนอก, ช่วงกว้างการปรับให้การเริ่มต้นที่นุ่มนวลและความเป็นไปได้ของการเปิดใช้งานภายนอก
พารามิเตอร์หลักและลักษณะของไมโครเซอร์กิต TL494:
· การจ่ายแรงดัน Ucc - 7 ... 40 V;
แรงดันไฟสะสมปิด ทรานซิสเตอร์ที่สำคัญไม่เกิน 40 V;
· กระแสของทรานซิสเตอร์เอาท์พุทคีย์ - 250 mA;
· แรงดันอ้างอิง - 5 V ± 5%;
· พลังทั่วไปการกระจายในโหมดต่อเนื่อง (แพ็คเกจ DIP-16.<25 ºС) – не более 1000 мВт;
ช่วงการทำงานของอุณหภูมิแวดล้อม:
· ด้วยคำต่อท้าย L - จาก -25 ... + 85 ºС;
· ด้วยคำต่อท้าย С - จาก 0… + 70 ºС
· กระแสผ่านเอาต์พุตป้อนกลับ - ไม่เกิน 0.3 mA;
·ความจุของตัวเก็บประจุเวลา St - 0.047 ... 10000 nF;
· ความต้านทานของตัวต้านทานเวลา - 1.8..500 kOhm;
· ความถี่กำเนิด - 1 ... 300 kHz;
· การบริโภคในปัจจุบันของไมโครเซอร์กิต - ไม่เกิน 20 mA;
· ด้านหน้าของพัลส์กระแสไฟขาออก - ไม่เกิน 200 ns;
· การสลายตัวของพัลส์กระแสไฟขาออก - ไม่เกิน 100 ns
นอกจากนี้ ไดรเวอร์เอาท์พุตอิสระของไมโครเซอร์กิตทรานซิสเตอร์ยังให้ความสามารถในการใช้งานสเตจเอาต์พุตตามวงจรอีซีแอลทั่วไปหรือวงจรอีซีแอลอีซีแอล
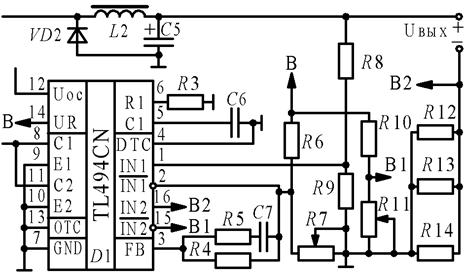
3.1.1. แผนภาพหลักการของพัลส์บัค
ตัวกันโคลงบน IC TL494
ในข้อเสนอ ข้าว. 37 โคลง, แรงดันไฟฟ้าอินพุตสูงสุดคือ 30 V, มันถูก จำกัด โดยแรงดันแหล่งระบายสูงสุดของทรานซิสเตอร์ p-channel field-effect ที่อนุญาต VT 1 RFP60P03 จาก Mitsubishi Electric ตัวต้านทาน NS 3 และตัวเก็บประจุ กับ 6 ตั้งค่าความถี่ของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อยภายในจะถูกกำหนดโดยสูตร

บน ข้าว. 37 ระบุว่า: VD 1-KD212A; VD 2-2D2998B; VT 1-RFP60PO3; ค 1, C2-2200μ × 40V; ค 3-10 ไมครอน × 63V; ค 4-0.1mk; ค 5-1000 μ × 25V; ค 6-4700;ค 7-0.1 ไมครอน; ฟู่ 1-MF R400; NS 1-200 โอห์ม, 0.125 วัตต์; NS 2-510 โอห์ม 0.5W; NS 3-30 kOhm, 0.125 W; NS 4-1 เมตร, 0.125 วัตต์; NS 5-47 kOhm, 0.125 W; NS 6-4.7 kOhm, 0.125 W; NS 7-4.7 kΩ; NS 8-5.6 kOhm, 0.125 W; NS 9-1 kOhm, 0.125 W; หลี่ 1-80 μH; I-6 A; คุณใน = 24 V; คุณออก = 0 ... 11 V.
จากแหล่งแรงดันอ้างอิง (พิน 14) ผ่านตัวแบ่งตัวต้านทาน NS 6, NS 7 ส่วนหนึ่งของแรงดันอ้างอิงถูกนำไปใช้กับอินพุทกลับด้านของแอมพลิฟายเออร์ข้อผิดพลาด # 1 (พิน 2) สัญญาณตอบรับผ่านตัวแบ่ง NS 8, NS 9 ถูกป้อนไปยังอินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาด (พิน 1) ของไมโครเซอร์กิต แรงดันเอาต์พุตถูกควบคุมโดยตัวต้านทาน NS 7. ตัวต้านทาน NS 5 และตัวเก็บประจุ กับ 7 แอมพลิฟายเออร์ข้อผิดพลาดได้รับการแก้ไขความถี่
ควรสังเกตว่าอิสระ ตัวสร้างสัญญาณเอาท์พุตของไมโครเซอร์กิตช่วยให้มั่นใจถึงการทำงานของสเตจเอาต์พุตทั้งในโหมดกด-ดึงและโหมดดึงเดี่ยว ในโคลง ไดรเวอร์เอาท์พุตของไมโครเซอร์กิตจะเปิดในโหมดรอบเดียวสำหรับสิ่งนี้ พิน 13 เชื่อมต่อกับสายทั่วไป ทรานซิสเตอร์เอาท์พุทสองตัว (ตัวสะสม - พิน 8, 11 ตามลำดับอีซีแอล - พิน 9, 10) เชื่อมต่อตามแบบแผนด้วยอีซีแอลทั่วไปและทำงานแบบขนาน ในกรณีนี้ ความถี่เอาต์พุตจะเท่ากับความถี่ของเครื่องกำเนิดไฟฟ้า สเตจเอาต์พุตของไมโครเซอร์กิตผ่านตัวแบ่งตัวต้านทาน NS 1, NS 2 ควบคุมองค์ประกอบหลักของโคลง FE - ทรานซิสเตอร์ภาคสนาม VT 1. ในวงจรไฟฟ้าของไมโครเซอร์กิต (ขา 12) เพื่อระงับการรบกวนความถี่สูงต่างๆ และการทำงานของโคลงโดยรวมมีเสถียรภาพมากขึ้น LC-กรององค์ประกอบ หลี่ 1, ค 3, ค 4. ดังที่เห็นได้จากแผนผังของตัวกันโคลง เมื่อใช้ไมโครเซอร์กิต TL494 จำเป็นต้องมีองค์ประกอบภายนอกจำนวนค่อนข้างน้อย
ฟิวส์แบบรักษาตัวเองใช้เพื่อป้องกันตัวกันโคลงจากกระแสเกิน ฟู่ 1 MF-R400 จาก Bouns หลักการทำงานของฟิวส์ดังกล่าวขึ้นอยู่กับคุณสมบัติของการเพิ่มความต้านทานอย่างรวดเร็วเมื่อเกินค่าเกณฑ์ของอุณหภูมิปัจจุบันหรืออุณหภูมิแวดล้อมและคืนค่าคุณสมบัติโดยอัตโนมัติเมื่อเหตุผลเหล่านี้ถูกกำจัด ด้านล่างนี้เป็นข้อกำหนดสำหรับฟิวส์ด้านบน:
· แรงดันใช้งานสูงสุด - 30 V;
· กระแสสูงสุดซึ่งไม่นำไปสู่การเปลี่ยนแปลงพารามิเตอร์ฟิวส์ - 4 A;
· กระแสซึ่งนำไปสู่การกระโดดในแนวต้าน - 8 A;
· ช่วงอุณหภูมิในการทำงาน - ตั้งแต่ -40 ถึง +85 ºС
สามารถลดการสูญเสียจากสวิตชิ่งและเพิ่มประสิทธิภาพของตัวกันโคลงได้ด้วยการใช้ไดโอด Schottky ( VD 2) KD2998B พร้อมพารามิเตอร์:
· แรงดันไปข้างหน้าคงที่ - 0.54 V;
· กระแสไปข้างหน้าเฉลี่ย - 30 A;
· ช่วงความถี่โดยไม่ลดค่าพารามิเตอร์ทางไฟฟ้า –10..200 kHz;
แรงดันย้อนกลับของพัลส์ - 30 V.
ลักษณะทางเทคนิคหลักของตัวกันบั๊ก (รูปที่ 37)
· แรงดันไฟฟ้าขาเข้า - 24 V;
· แรงดันไฟขาออก - 0 ... 11 V;
· กระแสโหลดสูงสุด - 6 A;
· แอมพลิจูดของแรงดันไฟขาออก - ไม่เกิน 100 mV;
· ความไม่แน่นอนของเอาต์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม - ไม่เกิน 1%;
· ค่าเฉลี่ยของประสิทธิภาพที่กระแสโหลดสูงสุดในช่วงแรงดันไฟขาออกทั้งหมด - ประมาณ 90%;
จากการทดลองพบว่าตัวกันโคลงมีประสิทธิภาพสูงสุด (≈90%) ที่ความถี่ 12 kHz แต่ด้วยกำลังขับที่ประมาณ 40 W จะสังเกตเห็นเสียงนกหวีดแทบไม่สังเกต นกหวีดจะหายไปหากความถี่ในการแปลงเพิ่มขึ้นเป็น 20 kHz (โดยมีประสิทธิภาพลดลง 2 ... 3%) ประสิทธิภาพที่กำลังขับสูงสุด 10 W (U out = 10 V) ถึง 93%
โช้ค L2 นั้นพันบนวงจรแม่เหล็กรูปวงแหวน MP-140 K24 × 13 × 6.5 สองวงที่พับเข้าด้วยกันและมีลวด PETV-2 45 รอบเส้นผ่านศูนย์กลาง 1.1 มม. วางเท่ากันในสองชั้นตลอดแนวขอบของวงแหวน ระหว่างชั้นควรวางผ้าเคลือบเงาสองชั้น LShMS-105-0.06 GOST 2214-78 ความเหนี่ยวนำของโช้กคือ 220 μH ตัวต้านทาน - C2-33N. ตัวเก็บประจุ กับ 1, กับ 2, กับ 3, กับ 5 - K50-35, กับ 4, กับ 6, กับ 7 - K10-17. ตัวต้านทานปรับค่าได้ - SP5-3 หรือ SP5-2VA ชิป TL494CN สามารถแทนที่ด้วย TL494LN หรือ KR1114EU4 คันเร่ง หลี่ 1 - DM-0.1 พร้อมตัวเหนี่ยวนำ 80 μH ฟิวส์รีเซ็ตตัวเองของซีรีส์ MF-R สามารถจับคู่กับเคสเฉพาะได้ ไดโอด VD 2 สามารถแทนที่ด้วยไดโอด Schottky อื่น ๆ ที่มีพารามิเตอร์ไม่เลวร้ายไปกว่าข้างต้นเช่น 20TQ045
ในโคลง หน่วยป้องกันกระแสเกินสามารถทำแตกต่างกันได้ TL494 มีแอมพลิฟายเออร์ข้อผิดพลาด # 2 (inverting I / O 15 ไม่ใช่ inverting I / O 16) เอาต์พุตของแอมพลิฟายเออร์ข้อผิดพลาดทั้งสองมีการใช้งานสูงและมีการควบคู่ OR ที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM ในการกำหนดค่านี้ แอมพลิฟายเออร์ที่ใช้เวลาในการเปิดเอาต์พุตสั้นที่สุดจะครอบงำลูปเกน
ส่วนของวงจรกันโคลงพร้อมชุดป้องกันกระแสเกินจะแสดงบน ข้าว. 38 .
ตัวต้านทานแบบขนาน NS 12-NS 14 ทำหน้าที่เป็นเซ็นเซอร์ปัจจุบันเชื่อมต่อแบบอนุกรมกับโหลด แรงดันไฟฟ้าจากเซ็นเซอร์ปัจจุบันถูกป้อนไปยังอินพุตที่ไม่กลับด้าน (พิน 16) ของแอมพลิฟายเออร์ข้อผิดพลาดหมายเลข 2 เกณฑ์ปัจจุบัน (แรงดันที่อินพุตกลับด้านของแอมพลิฟายเออร์พิน 15) ในโหลดถูกกำหนดโดยตัวแบ่ง NS 10, NS 11.
บน ข้าว. 38 ระบุว่า: VD 2-2D2998B; ค 5-1000 μ × 25V; ค 6-4700;ค 7-0.1 ไมครอน; NS 3-30 kOhm, 0.125 W; NS 4-1 เมตร, 0.125 วัตต์; NS 5-47 kOhm, 0.125 W; NS 6-4.7 kOhm, 0.125 W; NS 7-4.7 kΩ; NS 8-5.6 kOhm, 0.125 W; NS 9-1 kOhm, 0.125 W; NS 10-4.7 kΩ, 0.125 W; NS 11-270 โอห์ม; NS 12, NS 13, NS 14-0.1 kOhm, 1 W; หลี่ 1-80 μH; I-6 A; คุณออก = 0 ... 11 V.
ทันทีที่กระแสโหลดเกินค่าเกณฑ์ที่ตั้งไว้และตัวขยายข้อผิดพลาด # 2 ของไมโครเซอร์กิตมีบทบาทสำคัญในลูปควบคุม โคลงจะเริ่มทำงานในโหมดรักษาเสถียรภาพปัจจุบัน หากกระแสโหลดน้อยกว่าค่าเกณฑ์ ตัวกันโคลงจะกลับสู่โหมดปรับแรงดันไฟฟ้าให้คงที่ เพื่อลดการสูญเสียพลังงาน เซ็นเซอร์ปัจจุบันถูกสร้างขึ้นด้วยความต้านทานขั้นต่ำ 0.03 โอห์ม: ที่กระแสโหลดสูงสุด 6 A การกระจายพลังงานที่เซ็นเซอร์
กำลังเพียง 1.08 วัตต์ ตัวต้านทาน NS 12...NS 14 - ประเภท C5-16MV 1 W, 0.1 Ohm ± 1% ตัวต้านทาน NS 11 - SP5-3 หรือ SP5-2VA หากจำเป็น เพื่อลดการสูญเสีย ความต้านทานของเซ็นเซอร์ปัจจุบันสามารถลดลงได้อีก
โคลงทำบนกระดานที่มีขนาด 55 × 55 มม. ระหว่างการติดตั้ง ขอแนะนำให้แยกสายสามัญของส่วนกำลังของตัวปรับความคงตัวและสายสามัญของไมโครเซอร์กิตและเชื่อมต่อที่เอาต์พุตของตัวกันโคลง รวมทั้งลดความยาวของตัวนำ (โดยเฉพาะส่วนกำลังไฟฟ้า) .
ทรานซิสเตอร์ถูกติดตั้งบนหม้อน้ำที่มีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 110 ซม. 2 ไม่จำเป็นต้องปรับโคลงด้วยการติดตั้งที่เหมาะสม ในโคลงที่มีหน่วยป้องกันกระแสเกิน (รูปที่ 38) จำเป็นต้องตั้งค่าแรงดันไฟฟ้าที่พิน 15 ของไมโครเซอร์กิตซึ่งคำนวณโดยสูตร: U 15 = I × R โดยที่ I คือกระแสโหลดสูงสุด NS- ความต้านทานของเซ็นเซอร์ปัจจุบัน
เริ่มแรกไม่มีโหลดด้วยตัวต้านทาน NS 11 จำเป็นต้องตั้งค่าแรงดันไฟฟ้าที่ต้องการ ยูสำหรับกระแสโหลดสูงสุด (สำหรับกระแส I por = 8 A, U = 0.24 V) เป็นการดีกว่าที่จะเปิดเครื่องครั้งแรกที่โหลด 0.2 ... 0.4 A จากนั้นค่อย ๆ เพิ่มแรงดันไฟขาออกเป็นค่าสูงสุดจากนั้นเพิ่มกระแสโหลดตรวจสอบการเปลี่ยนแปลงของโคลงเป็นโหมดรักษาเสถียรภาพปัจจุบัน .
แทนที่จะใช้ทรานซิสเตอร์ RFP60P03 สามารถใช้ RFP10P03 ที่ถูกกว่าได้ แต่การใช้ฐานองค์ประกอบที่ถูกกว่าอาจทำให้คุณสมบัติทางเทคนิคของตัวกันโคลงเสื่อมลงได้
3.1.2. แผนภาพหลักการของพัลส์สเต็ปอัพ
ตัวกันโคลงบน IC TL494

ในบางกรณี จำเป็นที่แรงดันไฟขาออกของตัวกันโคลงจะสูงกว่าแรงดันไฟขาเข้า บน ข้าว. 39 บล็อกไดอะแกรมของโคลงชนิดเพิ่มความเร็วแบบขนานพัลส์จะแสดงขึ้น
ในตัวควบคุมการสลับนี้ด้วยองค์ประกอบเปิดที่สำคัญ FE กระแสจากแหล่งกำเนิด ยูทางเข้าไหลผ่านเค้น หลี่ 1 เก็บพลังงานไว้ในนั้น ไดโอด VD 1 ปิดพร้อมกันครับ กระแสเข้าสู่โหลดในช่วงเวลานี้มาจากตัวเก็บประจุเท่านั้น กับ 1 .
บน ข้าว. 39 ระบุว่า: VD 1-KD212A; VD 2-2D2998B; VT 1-IRFP540; ค 1, C2-2200μ × 40V; ค 3-10 ไมครอน × 63V; ค 4-0.1mk; ค 5, ค 6 - 3300 μ × 63 V; ค 7-4700; กับ 8-0.1 ไมครอน; กับ 9-1000 μ × 25 V; ฟู่ 1-MF R400; NS 1-1 kOhm, 0.25 W; NS 2-750 โอห์ม 0.25 วัตต์; NS 3-30 kOhm, 0.125 W; NS 4-1 เมตร, 0.125 วัตต์; NS 5-47 kOhm, 0.125 W; NS 6-4.7 kOhm, 0.125 W; NS 7-4.7 kΩ; NS 8-150 kOhm, 0.125 W; NS 9-4.7 kOhm, 0.125 W; หลี่ 1-80 μH; I-1.4 ก; คุณใน = 24 V; U ออก = 26.5 ... 50 V.
วินาทีถัดมา เมื่อ FE ปิด พลังงานสำลัก หลี่ 1 มอบให้กับภาระ ในกรณีนี้ แรงดันไฟขาออกจะสูงกว่าแรงดันไฟขาเข้า ต่างจากบั๊กโคลง ( ข้าว. 38 ) ที่นี่โช้กไม่ใช่องค์ประกอบตัวกรองและแรงดันเอาต์พุตจะมากกว่าแรงดันอินพุตตามจำนวนที่กำหนดโดยการเหนี่ยวนำของโช้ก หลี่ 1 และรอบการทำงานขององค์ประกอบหลักของ FE
ในโคลงบน ข้าว. 39 ใช้โดยพื้นฐานแล้วองค์ประกอบวิทยุเดียวกันกับที่พิจารณาก่อนหน้านี้
ลักษณะทางเทคนิคหลักของตัวเพิ่มความเสถียร:
· แรงดันไฟฟ้าขาเข้า - 24 V;
· แรงดันไฟขาออก - 26.5 ... 50 V;
· กระแสโหลดสูงสุด (ที่ U ออก = 50 V) - 1.4 A;
· แอมพลิจูดของแรงดันไฟขาออก - ไม่เกิน 200 mV;
· ความไม่แน่นอนของเอาต์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม - 1.5%;
· ค่าเฉลี่ยของประสิทธิภาพที่กระแสโหลดสูงสุดในช่วงแรงดันเอาต์พุตทั้งหมด - ประมาณ 9.2%;
· ความถี่การแปลง - 15 kHz;
· ช่วงอุณหภูมิในการทำงาน - ตั้งแต่ -25 ถึง +85 ºС;
· แอมพลิจูดของการกระเพื่อมของแรงดันไฟขาออกของโคลงที่โหลดสูงสุดคือประมาณ 200 mV
ระลอกคลื่นสามารถลดลงได้โดยการเพิ่มความจุของตัวกรองเอาต์พุต สำหรับการเริ่มต้นที่ "นุ่มนวลกว่า" ตัวเก็บประจุจะเชื่อมต่อระหว่างสายสามัญกับอินพุตที่ไม่กลับด้านของตัวขยายข้อผิดพลาด # 1 (พิน 1) กับ 9. เพื่อป้องกันโคลงจากกระแสเกิน คุณสามารถใช้หน่วยการทำงานที่แสดงในรูปที่ 38.
คันเร่ง หลี่ 2 เหมือนกับในวงจรควบคุมบั๊ก VT 1 - n-channel field-effect transistor IRF540 พร้อมพารามิเตอร์: U si = 100 V, I s u = 28 A, R si = 0.077 Ohm (ค่าสูงสุด) ตัวต้านทาน - C2-33N. ตัวเก็บประจุ กับ 1, กับ 2, กับ 3, กับ 5, กับ 6, กับ 8, กับ 9 - K50-35; กับ 4, กับ 7, กับ 8 - K10-17. ตัวต้านทานปรับค่าได้ - SP5-3 หรือ SP5-2VA ทรานซิสเตอร์ VT 1 ควรติดตั้งบนหม้อน้ำที่มีพื้นผิวที่มีประสิทธิภาพอย่างน้อย 100 ซม. 2 คุณสามารถใช้ทรานซิสเตอร์แบบสนาม n-channel ที่ถูกกว่าได้แน่นอนโดยมีลักษณะทางเทคนิคของตัวกันโคลง การเปิดเครื่องครั้งแรกทำได้ดีกว่าด้วยโหลดขนาดเล็ก 0.1 ... 0.2 A และแรงดันเอาต์พุตขั้นต่ำ จากนั้นค่อยๆ เพิ่มแรงดันเอาต์พุตและกระแสโหลดให้เป็นค่าสูงสุด
หากสเต็ปอัพและสเต็ปดาวน์สเต็ปดาวน์ทำงานจากแหล่งจ่ายแรงดันเดียวกัน ความถี่การแปลงของพวกมันจะถูกซิงโครไนซ์ ในไดอะแกรมการซิงโครไนซ์ของไมโครเซอร์กิต TL494 สองวงจรจะแสดงขึ้น ในการทำเช่นนี้ในตัวควบคุมทาส คุณต้องถอดตัวต้านทานเวลาและตัวเก็บประจุและปิดพิน 6 และ 14 ของไมโครเซอร์กิต แล้วเชื่อมต่อพิน 5 ของไมโครเซอร์กิตของตัวปรับความเสถียรทั้งสองเข้าด้วยกัน
ในสเต็ปอัพสเต็ปอัพ โช้ค หลี่ 2 ไม่มีส่วนร่วมในการปรับระลอกคลื่นแรงดัน DC เอาต์พุตให้เรียบ ในสเต็ปอัพสเต็ปอัพสำหรับการกรองคุณภาพสูงของแรงดันคงที่เอาท์พุต จำเป็นต้องใช้ฟิลเตอร์เอาท์พุตที่มีค่าขนาดใหญ่เพียงพอ หลี่และ กับ... สิ่งนี้นำไปสู่การเพิ่มขึ้นของมวลและขนาดของตัวกรองและอุปกรณ์โดยรวม ดังนั้นพลังเฉพาะของตัวควบคุมบั๊กจึงมากกว่าของตัวควบคุมบูสต์
3.1.3. แผนผังของพัลส์
ตัวควบคุมการกลับด้านบน IC TL494
แผนผังไดอะแกรมของตัวควบคุมการกลับด้านพัลส์จะแสดงบน ข้าว. 40. ISN นี้จัดทำขึ้นตามโครงการที่ให้ไว้ ในบทที่ 2 §2.2.3.
เช่นเดียวกับในสเต็ปอัพสเต็ปอัพโช้กเมื่อ FE เปิดจะสะสมพลังงานและเมื่อปิด FE มันจะให้โหลดอย่างไรก็ตามเนื่องจากลำดับการเชื่อมต่อองค์ประกอบที่แตกต่างกันโคลงมีคุณสมบัติ ของการกลับขั้วของแรงดันไฟขาออกที่สัมพันธ์กับแรงดันไฟขาเข้า
บน ข้าว. 40 ระบุว่า: VD 1-KD212A; VD 2-2D2998B; VT 1-RFP60PO3; ค 1, C2-2200μ × 40V; ค 3-10 ไมครอน × 63V; ค 4-0.1mk; ค 5-1000 μ × 25V; ค 6-4700;ค 7-220 μ × 40 V; กับ 8-0.1 ไมครอน; ฟู่ 1-MF R400; NS 1-200 โอห์ม, 0.125 วัตต์; NS 2-510 โอห์ม 0.5W; NS 3-1 kOhm, 0.125 W; NS 4-4.7 kOhm, 0.125 W; NS 5-30 kOhm, 0.125 W; NS 6-1 MΩ, 0.125 W; NS 7-47 kΩ; NS 8-1 kOhm, 0.125 W; NS 9-10 kOhm, 0.125 W; NS 10-1 kOhm, 0.125 W; NS 11-5.6 kOhm, 0.125 W; หลี่ 1-80 μH; I-4.5 A; อินพุต U = 24 V; คุณออก = 0 ... 11 V.
ในโคลงโคลงกลับโดยพื้นฐานแล้วจะใช้ส่วนประกอบอิเล็กทรอนิกส์แบบเดียวกันเหมือนในส่วนประกอบที่อธิบายไว้ก่อนหน้านี้
ลักษณะทางเทคนิคหลักของโคลงโคลง:
· แรงดันไฟฟ้าขาเข้า - 24 V;
· แรงดันไฟขาออก - 11 V;
· กระแสโหลดสูงสุด - 4.5 A;
· แอมพลิจูดของแรงดันไฟขาออก - ไม่เกิน 150 mV;
· ความไม่แน่นอนของเอาต์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม - 15%;
· ค่าเฉลี่ยของประสิทธิภาพที่กระแสโหลดสูงสุดในช่วงแรงดันไฟขาออกทั้งหมด - 80%;
· ความถี่การแปลง - 15 kHz;
· ช่วงอุณหภูมิในการทำงาน - ตั้งแต่ -25 ถึง +85 ºС
เพื่อที่จะกำจัดการไหลเข้าของกระแสไฟเข้า โดยเฉพาะอย่างยิ่งเมื่อใช้งานที่โหลดมาก การสตาร์ทแบบ "นุ่มนวล" จะถูกนำไปใช้ในตัวปรับความเสถียรโดยการแนะนำ NS 3 และ กับ 5.
ทรานซิสเตอร์ VT 1 ควรติดตั้งบนหม้อน้ำที่มีพื้นผิวที่มีประสิทธิภาพอย่างน้อย 140 ซม. 2 ไดโอด VD 2 ยังติดตั้งบนหม้อน้ำที่มีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 10 ซม. 2
แรงดันไฟฟ้าขาเข้าของตัวปรับความคงตัวสามารถลดลงหรือเพิ่มขึ้นได้หากคำนึงถึงข้อกำหนดข้างต้นทั้งหมดสำหรับตัวกันโคลงแต่ละตัว แต่กระแสจะต้องคำนวณตัวแบ่งใหม่ NS 1, NS 2 เพื่อให้กระแสแบ่งและแรงดันแหล่งเกตของทรานซิสเตอร์ VT 1ไม่เปลี่ยน ?????
ไมโครเซอร์กิตควบคุมพัลส์ KR142EP1 ช่วยให้มั่นใจได้ว่าการทำงานของ ISN ส่วนใหญ่อยู่ในโหมดเปิด-ปิดรีเลย์ แต่ไอซียังให้ความสามารถในการสร้างตัวควบคุมแรงดันไฟฟ้าที่มีการมอดูเลตความกว้างพัลส์
ตัวอย่างเช่น ถ้าด้วยเหตุผลใดก็ตาม การทำงานของอุปกรณ์ธรณีประตูต้องซิงโครไนซ์กับความถี่ของอุปกรณ์ภายนอกใดๆ สัญญาณการซิงโครไนซ์จะถูกส่งไปยังพิน 14 และ 15 ไอเอส มักใช้เครื่องกำเนิดพัลส์รูปสี่เหลี่ยมผืนผ้าเป็นอุปกรณ์ดังกล่าว - ออสซิลเลเตอร์หลัก แรงดันไฟสลับของรูปทรงสี่เหลี่ยมของเครื่องกำเนิดไฟฟ้าดังกล่าวโดยใช้ดิฟเฟอเรนติเอติ้ง RCโซ่ที่แปลงเป็นแรงดันฟันเลื่อย ยูดื่ม ในกรณีนี้จะใช้ตัวต้านทาน NS 10 microcircuits และตัวเก็บประจุภายนอกใช้ความจุขนาดเล็ก
ไดโอดใช้เป็นหน่วยอินพุตสำหรับสัญญาณนี้ VD 3...VD 6 เชื่อมต่อระหว่างแอมพลิฟายเออร์ดิฟเฟอเรนเชียลและทริกเกอร์ชมิตต์ ดังนั้นข้ามตัวต้านทาน NS 10 เปรียบเทียบแรงดันไฟฟ้าสองแบบ - อันแรกเป็นสัดส่วนกับการเปลี่ยนแปลงของแรงดันไฟฟ้าข้ามโหลด (เช่นเดียวกับใน IMS ที่มี RE) และจะถูกลบออกจากตัวสะสม VTแอมพลิฟายเออร์ DC ดิฟเฟอเรนเชียล 11 ตัว ยู ypt และอันที่สองคือแรงดันฟันเลื่อย ยูดื่ม จากการเปรียบเทียบแรงดันไฟฟ้าเหล่านี้ สัญญาณข้อผิดพลาดจะถูกแยกออก ซึ่งถูกส่งไปยังขั้นตอนการกลับด้าน VT 7.
แรงดันฟันเลื่อยต้องมีวงสวิงเพียงพอที่จะแปล VT 7 เข้าสู่สภาวะอิ่มตัว หลังในสถานะเปิดทำงานในโหมดที่ใกล้เคียงกับความอิ่มตัว ความล่าช้าของช่วงเวลาที่ VT 7 ออกจากความอิ่มตัวเมื่อเทียบกับขอบชั้นนำของแรงดันฟันเลื่อยขึ้นอยู่กับการเปิดทรานซิสเตอร์ VT 7,VT 8. หากทรานซิสเตอร์เกือบจะล็อค และแรงดันเฉลี่ยระหว่างฐานและตัวปล่อย กำหนดโดยศักย์สะสม VT 8 มีขนาดเล็กจากนั้นจะเท่ากับแรงดันไฟฟ้าที่ลดลงเชิงเส้นที่เอาต์พุตของวงจรเรียงกระแสเฉพาะเมื่อสิ้นสุดรอบเท่านั้น
ด้วยศักยภาพที่เพิ่มขึ้นในนักสะสม VT 11 (เช่น เมื่อแรงดันไฟฟ้าเพิ่มขึ้นตลอดโหลด) แรงดันไฟฟ้าก็เพิ่มขึ้นเช่นกัน ยูหีบห่อ. แรงดันไฟฟ้านี้สอดคล้องกับการหยุดชั่วคราวขนาดใหญ่ระหว่างพัลส์แรงดันไฟฟ้า (ระยะเวลาพัลส์แรงดันที่สั้นกว่า) ที่นำมาจากโหลดอีซีแอลทั้งหมดของทรานซิสเตอร์ VT 7,VT 8 - NS 9(ยู NS VT 6) ไมโครวงจร
ทรานซิสเตอร์ VT 6, VT 5, VT 4 เป็นแอมพลิฟายเออร์ของพัลส์ที่นำมาจากตัวต้านทาน NS 9. ขยายพัลส์จากตัวสะสม VT 4 ผ่านตัวแบ่งแรงดันไฟภายนอก ( NS 6, NS 3) ถูกป้อนเข้าสู่ฐาน VT 3 ซึ่งเป็นหนึ่งในทรานซิสเตอร์ของสวิตช์ที่รวมอยู่ในไอซี คีย์นี้ ( VT 2, VT 3) ในวงจรนี้ ISN จะควบคุมสวิตช์ไฟภายนอกซึ่งทำในรูปแบบของทรานซิสเตอร์คอมโพสิต ( VT 2, VT 3). ดังนั้นด้วยการเพิ่มขึ้นเช่นแรงดันไฟฟ้าที่อินพุตของ ISN แรงดันไฟฟ้า ยูน = (NSและ / T) คุณ n ที่โหลดจะยังคงไม่เปลี่ยนแปลงเนื่องจากเวลาบนสถานะของทรานซิสเตอร์ควบคุมของส่วนกำลังลดลง



