ข้าว. 96
แอมพลิฟายเออร์บัฟเฟอร์ DA3 พร้อมอินพุต - อินพุต 3 และอินพุต 4 - เชื่อมต่อกับจุดเอาต์พุตของช่องแรงดันไฟฟ้ารอง เมื่อใช้ร่วมกับฟังก์ชันบัฟเฟอร์ แอมพลิฟายเออร์นี้จะปรับระดับแรงดันไฟฟ้าที่ควบคุมให้เป็นปกตินั่นคือทำหน้าที่เป็นตัวแบ่งแรงดันไฟฟ้าเพื่อให้สามารถเปรียบเทียบค่ากับพิกัดของแหล่งจ่ายแรงดันอ้างอิงได้ การเปรียบเทียบค่าแรงดันไฟฟ้าเหล่านี้และการสร้างสัญญาณข้อผิดพลาดจะดำเนินการโดยเครื่องขยายเสียง DA2 สัญญาณข้อผิดพลาดผ่านไดโอดแยกส่วน วีดี 2 จ่ายให้กับหนึ่งในอินพุตของตัวเปรียบเทียบ DA4 อินพุตที่สองของตัวเปรียบเทียบจะได้รับแรงดันฟันเลื่อยที่สร้างโดยคาสเคด FPN การเปิดตัวน้ำตก FPN (จุดเริ่มต้นของแรงดันไฟฟ้าที่เพิ่มขึ้นเชิงเส้น) และการรีเซ็ตกระบวนการของช่วงเวลาก่อนหน้าพร้อมกันจะเกิดขึ้นในขณะที่หน้าพัลส์ที่สร้างโดยเครื่องกำเนิดไฟฟ้ามาถึง เครื่องกำเนิดไฟฟ้าจะสร้างลำดับของพัลส์ที่มีลักษณะความถี่ที่ค่อนข้างเสถียร สิ่งนี้จะสิ้นสุดการทำงานของตัวควบคุม PWM ในระดับการประมวลผลสัญญาณอะนาล็อก การสร้างสัญญาณ PWM เพิ่มเติมเกิดขึ้นโดยใช้วิธีการดิจิทัล ซึ่งองค์ประกอบที่ใช้งานอยู่ทั้งหมด รวมถึงสัญญาณแยกจาก CS ทำงานในโหมดหลัก
หลังจากที่ตัวเปรียบเทียบ DA4 ประมวลผลอิทธิพลของอินพุตแล้ว ลำดับของพัลส์จะปรากฏขึ้นที่เอาต์พุต ซิงโครนัสกับความถี่ของแรงดันไฟฟ้าฟันเลื่อย แต่ด้วยระยะเวลามอดูเลตของพัลส์เอง - สัญญาณ PWM แบบดิจิทัล ลำดับนี้ถูกส่งไปยังอินพุตขององค์ประกอบดิจิทัล DD2.1, DD2.2 ซึ่งทำหน้าที่ตรรกะ AND (วงจรจับคู่ระดับตรรกะสูง) ลำดับของพัลส์จะถูกส่งไปยังอินพุตที่สองของแต่ละองค์ประกอบของวงจร DD2 ซึ่งมีความถี่ต่ำกว่าความถี่ดั้งเดิมที่สร้างโดยเครื่องกำเนิดถึงสองเท่า ความถี่จะลดลงครึ่งหนึ่งในองค์ประกอบ DD1 - D-trigger ซึ่งเปิดอยู่ในโหมดการแบ่งความถี่ดั้งเดิม สถานะของเอาท์พุตทริกเกอร์จะเปลี่ยนไปเมื่อขอบของพัลส์ที่สร้างโดยเครื่องกำเนิดไฟฟ้ามาถึงที่อินพุตการนับ C ที่เอาต์พุตทริกเกอร์ Q (เอาต์พุตโดยตรง) และ -Q (เอาต์พุตผกผัน) สัญญาณจะอยู่ในแอนติเฟสในแต่ละช่วงเวลา เมื่อสัญญาณระดับสูงจากตัวเปรียบเทียบและสัญญาณจากตัวแบ่งความถี่ (ทริกเกอร์) ตรงกัน พัลส์ระดับสูงจะปรากฏขึ้นที่อินพุตขององค์ประกอบ DD2 และที่เอาต์พุต คาบของพัลส์ที่เอาต์พุตของแต่ละองค์ประกอบ DD2 เกิดขึ้นพร้อมกันกับคาบของความถี่ดั้งเดิมของเครื่องกำเนิดหารด้วยสอง กราฟิกกระบวนการการทำงานของตัวควบคุม PWM จะแสดงในรูปแบบของไดอะแกรมในรูปที่ 1 97. จุดบนไดอะแกรม (รูปที่ 97) ซึ่งแสดงไดอะแกรมแรงดันไฟฟ้านั้นจะถูกทำเครื่องหมายด้วยตัวเลขในวงกลม เพื่อความชัดเจนในแผนภาพที่สอง (รูปที่ 97) เส้นโค้งแรงดันไฟฟ้าสำหรับจุดที่ 1 (แรงดันฟันเลื่อย) และ 2 (แรงดันไฟฟ้าที่เอาต์พุตของบัฟเฟอร์แอมพลิฟายเออร์ DA1) จะรวมกัน
การทำงานของตัวควบคุม PWM นี้ดำเนินการดังต่อไปนี้: ขั้นตอนการจับคู่ KS ได้รับลำดับพัลส์แบบเลื่อนเวลาสองครั้งจากแต่ละองค์ประกอบของวงจร DD2 เนื่องจากการออกแบบเฉพาะของระยะกำลังของตัวแปลงแรงดันไฟฟ้า ระยะเวลาของพัลส์ในแต่ละลำดับจะแปรผกผันกับค่าปัจจุบันของแรงดันไฟฟ้าวงจรทุติยภูมิ (ที่โหลด) ขั้นพลังงานของคอนเวอร์เตอร์อยู่ในสถานะแอคทีฟ (การถ่ายเทพลังงาน) ไปยังโหลดระหว่างการทำงานของพัลส์ที่ถูกมอดูเลตตามระยะเวลา นี่คือวิธีการปรับแรงดันไฟฟ้าเอาท์พุตเพื่อรักษาระดับให้อยู่ภายในขีดจำกัดที่ระบุ
ระยะแอมพลิฟายเออร์ DA1 ได้รับการออกแบบมาเพื่อปิด (บล็อก) วงจรควบคุม PWM ในระหว่างการใช้กระแสไฟที่เพิ่มขึ้นอย่างมากในโหลด อินพุตของวงจร DA1 เชื่อมต่อกับเซ็นเซอร์ปัจจุบันที่ติดตั้งในวงจรโหลด ตราบใดที่ความต่างศักย์ไฟฟ้าที่อินพุต DA1 ไม่เกินค่าที่ระบุ นั่นคือปริมาณการใช้กระแสโหลดไม่เกินขีดจำกัดสูงสุดที่อนุญาต ตัวควบคุม PWM จะทำงานในโหมดปกติ เมื่อกระแสโหลดเพิ่มขึ้นเกินขีดจำกัดที่ตั้งไว้ แรงดันไฟฟ้าที่เอาต์พุต DA1 จะเพิ่มขึ้นเป็นค่าที่เพียงพอที่จะเปิดไดโอด วีดี 1. ที่แคโทด วีดี 1 มีการสร้างแรงดันไฟฟ้าบวกโดยปิดไดโอด วีดี 2. สัญญาณข้อผิดพลาดที่มาจากตัวขยายข้อผิดพลาด DA2 ไปยังอินพุตของตัวเปรียบเทียบ DA4 จะถูกแบ่งออก แรงดันไฟฟ้าที่ตั้งไว้ที่อินพุตของตัวเปรียบเทียบทำให้พัลส์ที่มาจากมันแคบลงอย่างมากไปยังวงจรดิจิตอล DD2.1 และ DD2.2 ส่วนกำลังของตัวแปลงจะสลับไปที่โหมดการทำงานที่ได้รับการป้องกัน ซึ่งบังคับให้จำกัดระดับพลังงานที่ส่งไปยัง CS ตัวควบคุม PWM จะคืนค่าการทำงานโดยอัตโนมัติหลังจากกำจัดเอาท์พุตโอเวอร์โหลดแล้ว
วงจรรวมควบคุมฮาล์ฟบริดจ์แบบกดดึง TL494 ตัวแปลงพัลส์แรงดันไฟฟ้า.
ในอุปกรณ์จ่ายไฟสำรองสมัยใหม่ (SPS) มีความเชี่ยวชาญ วงจรรวม(IC ต่อไปนี้จะเรียกว่า IS)
IC ควบคุมในอุดมคติเพื่อให้แน่ใจว่าการทำงานปกติ ตัวแปลงแบบกดดึงในโหมด PWM จะต้องเป็นไปตามเงื่อนไขส่วนใหญ่ต่อไปนี้:
· แรงดันไฟฟ้าใช้งานไม่สูงกว่า 40 V;
· มีแหล่งกำเนิดแรงดันอ้างอิงที่มีความเสถียรทางความร้อนที่มีความเสถียรสูง
·การมีเครื่องกำเนิดแรงดันไฟฟ้าแบบฟันเลื่อย
·  ให้ความสามารถในการซิงโครไนซ์ซอฟต์สตาร์ทที่ตั้งโปรแกรมได้กับสัญญาณภายนอก
ให้ความสามารถในการซิงโครไนซ์ซอฟต์สตาร์ทที่ตั้งโปรแกรมได้กับสัญญาณภายนอก
การมีเครื่องขยายสัญญาณที่ไม่ตรงกัน
มีแรงดันไฟฟ้าโหมดทั่วไปสูง
· มีตัวเปรียบเทียบ PWM
· มีทริกเกอร์ควบคุมด้วยพัลส์
· การมีอยู่ของน้ำตกก่อนเทอร์มินัลสองช่องสัญญาณพร้อมการป้องกันไฟฟ้าลัดวงจร
· การปรากฏตัวของตรรกะการปราบปรามชีพจรคู่;
· ความพร้อมของวิธีการแก้ไขความสมมาตรของแรงดันไฟฟ้าด้านออก
· มีข้อจำกัดกระแสในช่วงแรงดันไฟฟ้าโหมดทั่วไปที่หลากหลาย ตลอดจนข้อจำกัดกระแสในแต่ละช่วงที่มีการปิดเครื่องในโหมดฉุกเฉิน
· ความพร้อมใช้งาน ควบคุมอัตโนมัติด้วยการส่งสัญญาณโดยตรง
· รับประกันการปิดเครื่องเมื่อแรงดันไฟจ่ายลดลง
· จัดให้มีการป้องกันแรงดันไฟฟ้าเกิน
· รับประกันความเข้ากันได้กับตรรกะ TTL/CMOS
· ให้การเปิดและปิดระยะไกล
การแปลงสัญญาณ PWM ขั้นพื้นฐานทั้งหมดตลอดจนการก่อตัวของสัญญาณนั้นดำเนินการโดยโมดูเลเตอร์ที่ทำบนไมโครวงจรประเภท TL494 มีสองกรณีที่มีการผลิตไมโครวงจรนี้ โดยทั่วไปแหล่งจ่ายไฟจะใช้แพ็คเกจ DIP พลาสติกที่มี 16 พิน (รูปที่ 98) ชื่อเต็มของไมโครวงจรในแพ็คเกจดังกล่าวคือ TL494CN ชื่อนี้หมายถึงชิปที่ผลิตโดย Texas Instruments วัตถุประสงค์การใช้งานหมุดของไมโครวงจรแสดงไว้ในตาราง 7.
ตารางที่ 7
อะนาล็อกที่สอดคล้องกันของไมโครวงจรนี้ผลิตโดย บริษัท อื่น ๆ และแต่ละบริษัทก็กำหนดตราสินค้าของตัวเอง ยกตัวอย่าง: FUJITSU - MB3759, SAMSUNG-KA7500, FAIRCHILD - TA494, ไมโครวงจร การผลิตของรัสเซีย- KR1114EU4 บริษัท SHARP - IP3MO2 ไมโครวงจรนี้ได้รับการออกแบบมาโดยเฉพาะสำหรับการสร้างโหนด PWM แพ็คเกจชิป TL494CN ประกอบด้วยขั้นตอนที่จำเป็นทั้งหมด
แผนภาพการทำงานของตัวแปลง PWM แบบรวมประเภท TL494 แสดงไว้ในรูปที่ 1 99.

รายการที่แสดงใน แผนภาพการทำงานมีชื่อและวัตถุประสงค์ดังต่อไปนี้
· บนองค์ประกอบที่รวมอยู่ในหน่วยภายใต้ชื่อทั่วไป "เครื่องกำเนิดไฟฟ้า" จะมีการประกอบน้ำตกหลักของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (SPG) ลักษณะเวลาของการแกว่งซึ่งกำหนดโดยองค์ประกอบภายนอก Rt, Ct เชื่อมต่อกับหมุด 5 และ 6 ของ DA6 และความถี่ในการสร้างจะเท่ากับ
f = 1.1 / (Rt × Ct)
· แหล่งจ่ายแรงดันอ้างอิง (พิน 14) ได้รับการออกแบบมาเพื่อสร้างแรงดันไฟฟ้าที่เสถียรโดยมีค่าระบุ +5 V ซึ่งใช้เพื่อดำเนินการขั้นตอนการเปรียบเทียบและสร้างแรงดันไฟผิดพลาด ความถูกต้องของแรงดันอ้างอิงอยู่ภายใน ± 5%;
องค์ประกอบ DA1 - ตัวเปรียบเทียบ " โซนตาย", ช่วงเวลาระหว่างพัลส์เอาท์พุต;
· องค์ประกอบ DA2 - ตัวเปรียบเทียบสำหรับการเปรียบเทียบสัญญาณที่ไม่ตรงกันและแรงดันฟันเลื่อย - ตัวเปรียบเทียบ PWM;
· เครื่องขยายสัญญาณปฏิบัติการ DA3 และ DA4 – วงจรสำหรับการสร้างสัญญาณที่ไม่ตรงกัน
· องค์ประกอบที่มีตัวเลข DD1 - DD6 เกี่ยวข้องกับเทคโนโลยีระบบอัตโนมัติแบบดิจิทัลและดำเนินการประมวลผลเชิงตรรกะของสัญญาณที่มาจากตัวเปรียบเทียบ PWM DA2
· ทรานซิสเตอร์ VT1 และ VT2 สองตัวใช้ในการสร้างแอมพลิฟายเออร์สำหรับระดับและกำลังของลำดับพัลส์เอาท์พุต ขั้วต่อตัวสะสมและตัวปล่อยของทรานซิสเตอร์เหล่านี้ถูกปล่อยทิ้งไว้เพื่อขยายความเป็นไปได้ในการเชื่อมต่อเข้ากับขั้นตอนต่อ ๆ ไป
แหล่งจ่ายแรงดันไฟฟ้ากระแสตรงพิกัด 0.1 V ดี.เอ. 7;
· แหล่งที่มา กระแสตรงโดยมีค่าระบุอยู่ที่ 0.7 มาดา 8.
แอมพลิฟายเออร์สำหรับการดำเนินงานสัญญาณผิดพลาดมีช่วงแรงดันไฟฟ้าอินพุตการทำงานตั้งแต่ -0.3 ถึง 2 V ค่าสุดท้าย (สูงสุด) สอดคล้องกับ U n - แรงดันไฟฟ้าของวงจรไมโคร ที่อินพุตของตัวเปรียบเทียบ "โซนตาย" จะมีการติดตั้งไบแอสทางเทคโนโลยี เพื่อให้มั่นใจว่ามีการหยุดชั่วคราวขั้นต่ำระหว่างพัลส์ควบคุม แรงดันไฟฟ้าขณะทำงานแหล่งจ่ายไฟบนชิปสามารถตั้งค่าได้ตามใจชอบในช่วงตั้งแต่ 7 ถึง 40 V ค่าขีดจำกัดของแรงดันไฟฟ้าของวงจรไมโครและระดับแรงดันไฟฟ้าที่ตัวสะสมของทรานซิสเตอร์เอาต์พุตคือ 41V ค่าสูงสุดของตัวสะสมปัจจุบัน Ik สูงสุดเท่ากับ 250 mA, กระแสไฟฟ้าที่แนะนำ - 200 mA, การกระจายพลังงาน 1W
ช่วงความถี่การทำงานของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อยอยู่ระหว่าง 1 ถึง 300 kHz ตัวเก็บประจุที่เชื่อมต่อกับพิน 5 ของชิป IC สามารถมีค่าเล็กน้อยตั้งแต่ 470 pF ถึง 10 μF ตัวต้านทานสำหรับการติดตั้งในวงจรจับเวลา - ในช่วง 1.8-500 kOhm
ช่วงอุณหภูมิอุณหภูมิการทำงานของไมโครวงจรประเภท TL494CN คือ 0-70 °C
ตัวแปลงพัลส์ซึ่งทำงานบนหลักการมอดูเลตความกว้างพัลส์เป็นหนึ่งในขั้นตอนหลัก แหล่งชีพจรโภชนาการ หลักการทำงานของแหล่งกำเนิดคือการจ่ายพลังงานทั้งหมดให้กับวงจรไฟฟ้าทุติยภูมิขึ้นอยู่กับตัวควบคุม PWM ความถูกต้องของการดำเนินการถูกกำหนดโดยพารามิเตอร์ของการรักษาเสถียรภาพของความเค้นทุติยภูมิ อธิบายไว้ข้างต้นแล้ว (ดูด้านบน) หลักการทั่วไป การมอดูเลตความกว้างพัลส์และการใช้ในแหล่งจ่ายไฟทุติยภูมิแบบพัลซิ่ง ในส่วนนี้จะพิจารณาการใช้งานหลักการนี้ในทางปฏิบัติโดยใช้ตัวอย่างของน้ำตกพิเศษที่ออกแบบมาเพื่อควบคุมการทำงานของแหล่งพลังงานเช่นในคอมพิวเตอร์ บนชิ้นส่วน แผนภาพแสดงในรูปที่ 100 ขั้นตอนตัวแปลง PWM จะรวมโหนดที่สร้างขึ้นจากองค์ประกอบที่ใช้งานอยู่ต่อไปนี้โดยตรง:
· ชิปไอซีชนิด TL494 - คอนเวอร์เตอร์ PWM วงจรขององค์ประกอบแบบพาสซีฟที่เชื่อมต่อกับไมโครวงจรจะตั้งค่าพารามิเตอร์ไดนามิกของการทำงานและเช่นกัน ส่วนประกอบเซ็นเซอร์สำหรับตรวจสอบระดับแรงดันไฟฟ้าทุติยภูมิ
· กลุ่มองค์ประกอบบนทรานซิสเตอร์และหม้อแปลงไฟฟ้าที่ตรงกัน โทรทัศน์ 2 สร้างน้ำตกจับคู่ระดับและพลัง สัญญาณชีพจรระหว่างเอาต์พุตของตัวแปลง PWM และวงจรอินพุตของเพาเวอร์แอมป์
· มีการติดตั้งโหนดบนทรานซิสเตอร์อื่นสำหรับตัวควบคุม PWM เพื่อรับสัญญาณเกี่ยวกับการเพิ่มหรือลดระดับแรงดันไฟฟ้าทุติยภูมิที่ไม่สามารถควบคุมได้ ยังใช้เพื่อป้องกันวงจรทุติยภูมิด้วย
นับตั้งแต่วินาทีที่แรงดันไฟฟ้าถูกนำไปใช้กับพิน 12 สัมพันธ์กับพิน 7 ตัวควบคุม PWM จะเริ่มสร้างสัญญาณพัลส์ที่หน้าสัมผัสเอาต์พุต (เทอร์มินัลของตัวสะสมและตัวปล่อยของทรานซิสเตอร์ VT1 และ VT2) อย่างเป็นทางการ หากต้องการรับลำดับพัลส์ที่พินเหล่านี้ จะไม่มีสัญญาณ ข้อเสนอแนะไม่จำเป็นต้องใช้. แต่องค์ประกอบแบบพาสซีฟจะต้องเชื่อมต่อกับไมโครวงจรโดยตั้งค่าพารามิเตอร์การทำงานของเครื่องกำเนิดและให้อคติที่อินพุตของแอมพลิฟายเออร์ในการดำเนินงาน ในการสังเกตพัลส์ที่ขั้วของทรานซิสเตอร์เอาต์พุตจะต้องติดตั้งตัวต้านทานโหลดเพิ่มเติมในวงจรซึ่งกำหนดวงจรสำหรับการเชื่อมต่อ
พิจารณาวงจรสำหรับการเปิดตัวแปลง PWM ในระบบควบคุมการจ่ายไฟแบบสวิตชิ่งโดยใช้การกำหนดการทำงาน (รูปที่ 99) และแผนภาพวงจร (รูปที่ 100)
เมื่อแรงดันไฟจ่ายถูกจ่ายให้กับอินพุตของแหล่งพัลส์ แหล่งจ่ายเสริมจะสร้างแรงดันไฟฟ้าสอง Uadd1 และ Uadd2 ประการแรกมีจุดมุ่งหมายเพื่อจ่ายไฟให้กับตัวป้องกันช่องสัญญาณสแตนด์บาย (หากจำเป็น) และประการที่สองคือการจ่ายแรงดันไฟฟ้ากระแสตรงให้กับชิปตัวป้องกันสัญญาณรบกวน PWM คอนเวอร์เตอร์ PWM ได้รับพลังงานจากแรงดันไฟฟ้าที่แยกทางไฟฟ้าจากเครือข่ายแหล่งจ่ายไฟหลัก
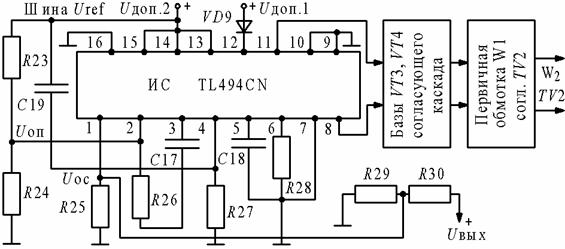
แรงดันไฟฟ้าที่จ่ายให้กับขา 12 (รูปที่ 101) ของชิป IC จากวงจรเรียงกระแสถึง วีดี 9 ไม่เสถียรและทำหน้าที่สำหรับการเปิดตัวชิปนี้ครั้งแรก ในการสร้างแรงดันไฟฟ้าฟันเลื่อยโดยเครื่องกำเนิดภายในของชิป IC ตัวต้านทาน R28 ที่มีค่าความต้านทานเล็กน้อยเช่น 12 kOhm เชื่อมต่อระหว่างพิน 6 และสายสามัญของแรงดันไฟฟ้าทุติยภูมิและตัวเก็บประจุ C18 ที่มี ตัวอย่างเช่น ความจุ 1500 pF เชื่อมต่อระหว่างสายสามัญกับขา IC 5 (รูปที่ 100) ตามเอกสารการบริการสำหรับชิป TL494 การคำนวณความถี่ในการสร้างสัมพันธ์กับองค์ประกอบของแผนภาพวงจรนี้สามารถทำได้โดยใช้สูตรต่อไปนี้:
ด้วยค่าที่ระบุขององค์ประกอบของห่วงโซ่ RC ความถี่การทำงานของเครื่องกำเนิดไฟฟ้าคือ ~ 55.5 kHz เครื่องกำเนิดไฟฟ้าภายในสร้างสัญญาณด้วยแรงดันไฟฟ้าที่เพิ่มขึ้นรูปร่างที่แสดงในแผนภาพด้านบนในรูปที่ 101
ตามเอกสารทางเทคนิคสำหรับชิป TL494 แรงดันไฟฟ้าที่เพิ่มขึ้นถึงระดับ +3.2 V หลังจากนั้นตัวเก็บประจุจะถูกปล่อยออกมาและแรงดันฟันเลื่อย U 5 ที่ลดลงทันทีจนเหลือศูนย์ จากนั้นกระบวนการจะทำซ้ำเป็นรอบ (ดูแผนภาพในรูปที่ 101) การปรากฏตัวของสัญญาณมีลักษณะเป็นคุณภาพและไม่สะท้อนความสัมพันธ์แบบเรียลไทม์และแอมพลิจูด
แรงดันฟันเลื่อยถูกจ่ายให้กับอินพุตกลับหัวของตัวเปรียบเทียบ "โซนตาย" - องค์ประกอบ DA1 และตัวเปรียบเทียบ PWM - องค์ประกอบ DA2 แหล่งที่มาภายในของอคติเริ่มต้นเชื่อมต่อกับอินพุตที่สองของตัวเปรียบเทียบซึ่งเป็นค่าที่ตั้งไว้และ คือ U 4 = 100 mV
ในแผนภาพที่ 1 รูปที่ 1 101 การมีอยู่ของแหล่งกำเนิดนี้แสดงตามอัตภาพโดยเส้นตรงที่ตัดกัน "ฟัน" ของแรงดันไฟฟ้าฟันเลื่อย ตัวเปรียบเทียบเป็นอุปกรณ์เกณฑ์ดังนั้นเอาต์พุตจึงสร้างสัญญาณที่มีค่าใช้เพียงสองสถานะเท่านั้น ถ้าแรงดันไฟฟ้าที่อินพุทกลับด้านเกินระดับแรงดันไฟฟ้าที่อินพุทที่ไม่กลับด้าน เอาท์พุทของเครื่องเปรียบเทียบจะถูกตั้งค่าเป็นแรงดันไฟฟ้าต่ำ ในกรณีนี้คือศูนย์ และในทางกลับกัน หากแรงดันไฟฟ้าที่อินพุตแบบกลับด้านน้อยกว่าที่อินพุตแบบไม่กลับด้าน แรงดันเอาต์พุตจะใช้ค่าในระดับสูง ซึ่งใกล้กับระดับแหล่งจ่ายไฟ ในกรณีของเรา เมื่อแรงดันไบแอสเริ่มต้นที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 มากกว่าแรงดันไฟฟ้าของเครื่องกำเนิดฟันเลื่อยที่ใช้กับอินพุตที่สอง แรงดันเอาต์พุต (แผนภาพที่ 2 ในรูปที่ 101) จะมีระดับสูง องค์ประกอบคาสเคดแบบแยกที่มีแรงดันไฟฟ้าบวกเท่านั้นเชื่อมต่อกับอินพุตของ IC 4 ออฟเซ็ต 100 mV บนอินพุตที่ไม่กลับด้านของ DA1 นั้นน้อยมาก และการเพิ่มแรงดันไฟฟ้าบน IC 4 ก็สามารถเพิ่มได้เท่านั้น ดังนั้นเราจึงสามารถสรุปได้ว่าระยะเวลาของพัลส์ที่สร้างขึ้นที่เอาต์พุตของ DA1 ที่อคติเริ่มต้นที่กำหนดนั้นมีค่าต่ำสุด และด้วยแรงดันไฟฟ้าที่เพิ่มขึ้นที่พิน IC 4 ระยะเวลาของพัลส์ของขั้วบวกจะเพิ่มขึ้นเท่านั้น ผลกระทบที่คุณสมบัตินี้มีต่อการทำงานของวงจรควบคุมทั้งหมดจะกล่าวถึงด้านล่าง ลำดับพัลส์เป็นระยะจากเอาต์พุตของตัวเปรียบเทียบ DA1 จะถูกส่งไปยังองค์ประกอบลอจิกประเภท OR ดิจิทัล - DD1 อัตราการทำซ้ำของพัลส์ถูกกำหนดโดยลักษณะเวลาของแรงดันฟันเลื่อย
ในแผนภาพที่ 3 รูปที่. รูปที่ 101 แสดงแรงดันฟันเลื่อยและแรงดันป้อนกลับ U 3 ซึ่งสามารถเปลี่ยนแปลงได้ขึ้นอยู่กับการกระทำของปัจจัยที่ไม่เสถียร (รูปที่ 100)
เครื่องขยายข้อผิดพลาดในองค์ประกอบ DA3 จะเปรียบเทียบแรงดันป้อนกลับและแรงดันอ้างอิงระดับของแรงดันหลังจะถูกกำหนดโดยอัตราส่วนของตัวต้านทาน R23 และ R24 ที่เชื่อมต่อระหว่างพิน IC 14 และสายทั่วไป 100. ระยะภายในของวงจร IC สร้างแรงดันไฟฟ้าที่เสถียรที่ IC 14 พินโดยมีค่าระบุ +5 V ตัวต้านทาน R23 และ R24 เป็นตัวแบ่งแรงดันซึ่งจุดกึ่งกลางเชื่อมต่อผ่าน IC 2 พินเข้ากับ อินพุตกลับด้านของแอมพลิฟายเออร์ปฏิบัติการ DA3 อินพุตที่ไม่กลับด้าน DA3 ผ่านตัวต้านทานสองตัว R29 และ R30 รับแรงดันไฟฟ้าจากเอาต์พุตของช่องแรงดันไฟฟ้าทุติยภูมิที่มีค่าเช่น +5 V อินพุตของ IC 1 เชื่อมต่อผ่านตัวต้านทาน R25 กับกำลังไฟรองทั่วไป ลวด. ค่าความต้านทานของตัวต้านทาน R25 และ R29, R30 ซึ่งสร้างตัวแบ่งจะถูกเลือกในลักษณะที่ค่าเล็กน้อยของแรงดันไฟฟ้าทุติยภูมิเอาต์พุตที่พิน IC 1 แรงดันไฟฟ้าจะถูกตั้งค่าต่ำกว่าค่าของ +2.5 V ซึ่งจะสร้างอคติดิฟเฟอเรนเชียลเริ่มต้นที่อินพุต DA3 แอมพลิฟายเออร์ DA3 ทำงานในโหมดเชิงเส้น พารามิเตอร์เกนถูกกำหนดโดยวงจรภายในของสเตจนี้ DA3 ใช้พลังงานจากแหล่งภายในเท่านั้นด้วย ค่าบวกแรงดันไฟฟ้า. ดังนั้นการเปลี่ยนแปลงแรงดันเอาต์พุตบน DA3 จึงสามารถเกิดขึ้นได้เฉพาะในบริเวณบวกเท่านั้น เพื่อให้เป็นไปตามเงื่อนไขนี้ แรงดันไฟฟ้าที่ขา IC 1 ไม่ควรเกิน +2.5 V หากเกินเกณฑ์นี้จะส่งผลให้แรงดันไฟฟ้าที่เอาต์พุต DA3 ถูกตั้งค่าเป็นศูนย์ นอกจากนี้ เราจะถือว่าสิ่งนี้ไม่เกิดขึ้น และวงจรทำงานภายในช่วงที่กำหนดสำหรับโซนควบคุม
ดังนั้นแรงดันไฟฟ้าที่อินพุตของ IC 2 จึงเป็นค่าคงที่และแรงดันป้อนกลับจะถูกส่งไปยังอินพุตของ IC 1 จากโหลดซึ่งมีค่าเบี่ยงเบนที่กำหนดโดยปัจจัยรบกวน ที่เอาต์พุตของแอมพลิฟายเออร์ DA3 สัญญาณที่ไม่ตรงกันหรือข้อผิดพลาดจะถูกสร้างขึ้น ความแม่นยำจะถูกกำหนดโดยพารามิเตอร์เสถียรภาพของแหล่งแรงดันอ้างอิงภายในของชิป IC เป็นที่ชัดเจนว่าการเบี่ยงเบนทั้งหมดจากค่าเล็กน้อยจะถูกส่งไปยัง IC 2 เอาต์พุตของ DA3 เชื่อมต่อกับอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM - DA2 และแรงดันไฟฟ้าฟันเลื่อยจากเครื่องกำเนิดไฟฟ้าจะถูกส่งไปยังอินพุตที่สอง . รูปร่างของสัญญาณต่างๆ ที่อินพุต DA2 แสดงในแผนภาพที่ 3 แสดงในรูปที่ 101 เส้นที่ตัดกับ "เลื่อย" จะแสดงแรงดันไฟฟ้าที่อินพุตที่ไม่กลับด้านของ DA2 รูปร่างสัญญาณผลลัพธ์ที่เอาต์พุต DA2 จะแสดงในแผนภาพที่ 4 (ดูรูปที่ 101) จะเห็นได้ว่าพัลส์ของขั้วบวกเกิดขึ้นที่นี่ในกรณีที่ระดับแรงดันไฟฟ้าที่จ่ายจากเอาต์พุต DA3 เกินระดับแรงดันไฟฟ้าที่เพิ่มขึ้นเชิงเส้นที่อินพุตแบบกลับด้าน DA2 แผนภาพ 4 แสดงให้เห็นว่าระยะเวลาของพัลส์บวกและการหยุดชั่วคราวระหว่างพัลส์จะเปลี่ยนไปอย่างไร ขึ้นอยู่กับรูปร่างแรงดันไฟฟ้าที่เอาต์พุต DA3 ระยะเวลาของพัลส์บวกจะเพิ่มขึ้นเมื่อระดับที่เอาต์พุต DA3 เพิ่มขึ้น กล่าวคือ ระยะเวลาพัลส์จะเป็นสัดส่วนโดยตรงกับระดับแรงดันไฟฟ้าที่เอาต์พุตของเครื่องขยายสัญญาณข้อผิดพลาด
ลำดับของพัลส์จะถูกส่งไปยังอินพุตที่สองขององค์ประกอบดิจิทัล DD1 ซึ่งอินพุตแรกจะรับสัญญาณพัลส์จากเอาต์พุตของ DA1 - ตัวเปรียบเทียบ "โซนตาย"
องค์ประกอบของชิป IC ซึ่งการทำงานตามที่อธิบายไว้ข้างต้นรวมอยู่ในส่วนอะนาล็อกของการประมวลผลและสร้างสัญญาณ ควรสังเกตว่าผู้เปรียบเทียบครอบครองตำแหน่งเขตแดนที่นี่ เมื่อรับสัญญาณอะนาล็อกที่อินพุต จะสร้างสัญญาณสองระดับที่เอาต์พุต ส่วนประกอบก็เหมือนกัน การกำหนดตัวอักษร DD หมายถึงองค์ประกอบระบบอัตโนมัติแบบดิจิทัลโดยเฉพาะที่ทำงานด้วยสัญญาณแยกที่ทั้งอินพุตและเอาต์พุต สัญญาณมีเพียงสองระดับ ในตรรกะเชิงบวก (เราจะยึดตามคำศัพท์นี้ต่อไป) หน่วยลอจิคัลมักจะถือว่าเป็นค่าแรงดันไฟฟ้าใกล้กับระดับแหล่งจ่ายไฟที่เป็นบวก ระดับศูนย์ลอจิกคือระดับต่ำใกล้กับศักย์ไฟฟ้าของสายไฟร่วม
สถานะเอาต์พุตขององค์ประกอบ DD1 แบบลอจิคัล OR จะใช้ค่าของโลจิคัลก็ต่อเมื่อสัญญาณอินพุตอย่างน้อยหนึ่งรายการ (ตามอำเภอใจ) มีระดับลอจิคัลสูงเช่นกัน เอาต์พุตจะถือว่าอยู่ในสถานะระดับต่ำเมื่ออินพุตทั้งหมดขององค์ประกอบลอจิก OR มาพร้อมกับแรงดันไฟฟ้าระดับต่ำด้วย
ประเภทของสัญญาณเอาท์พุตพัลส์ขององค์ประกอบ DD1 แสดงอยู่ในแผนภาพที่ 5 ลำดับที่ได้รับที่เอาต์พุตของ DD1 เป็นพื้นฐานสำหรับการก่อตัวของการดำเนินการควบคุมขั้นสุดท้ายบน องค์ประกอบพลังงานเพาเวอร์แอมป์ ความสัมพันธ์ของจังหวะเวลาทั้งหมดของสัญญาณสุดท้ายถูกฝังอยู่ในลำดับเริ่มต้นนี้แล้ว เอาต์พุตของ DD1 เชื่อมต่อกับอินพุตการนับ C ของทริกเกอร์แบบไดนามิก - DD2 รวมถึงหนึ่งในอินพุตขององค์ประกอบลอจิกแต่ละตัว DD5 และ DD6
สถานะของเอาต์พุตของทริกเกอร์แบบไดนามิกจะเปลี่ยนไปตามการมาถึงของขอบพัลส์บวกที่อินพุตการนับ ในขณะนี้สถานะของอินพุตข้อมูลพิน D จะถูก "เขียนใหม่" (ซ้ำ) ไปยังเอาต์พุตโดยตรงของทริกเกอร์ - พิน Q เอาต์พุต (-Q) จะมีสถานะตรงข้ามกับ Q เสมอ (แผนภาพ 6 และ 7 ).
แผนภาพการทำงานที่แสดงในรูปที่ 99 แสดงให้เห็นว่าไดนามิกทริกเกอร์ DD2 (D-trigger) มีเอาต์พุตผกผันที่เชื่อมต่อกับอินพุตข้อมูล - D การเชื่อมต่อของทริกเกอร์นี้ตั้งค่าให้อยู่ในโหมดการแบ่งความถี่ของลำดับพัลส์ที่มาถึง ที่อินพุตการนับสอง ทริกเกอร์ถูกกระตุ้น นั่นคือ การเปลี่ยนแปลงสถานะของเอาท์พุตพาราเฟส จะเกิดขึ้นเฉพาะในขณะที่ขอบบวกของพัลส์มาถึงอินพุต C เท่านั้น ในเวลานี้ แต่ละเอาต์พุตจะเปลี่ยนสถานะไปในทางตรงกันข้าม พิน Q และ D เชื่อมต่อถึงกัน ดังนั้น การเปลี่ยนแปลงในสถานะของเอาต์พุต Q จะถูกส่งไปยังอินพุต D ด้วยเหตุนี้ แต่ละขอบที่มาถึงอินพุต C จะเขียนระดับอินพุต D ที่เปลี่ยนแปลงไปใหม่ไปยังเอาต์พุต ระหว่างการมาถึงของ ขอบทั้งสอง สถานะของเอาท์พุตทริกเกอร์ยังคงมีเสถียรภาพ ดังแสดงในแผนภาพ 7 และ 6 (ดูรูปที่ 101) แผนภาพ 7 สอดคล้องกับสถานะของเอาต์พุตโดยตรงของทริกเกอร์ - พิน Q และแผนภาพ 6 สอดคล้องกับการเปลี่ยนแปลงสถานะของเอาต์พุตผกผัน - พิน (-Q) ทริกเกอร์จะสลับไปที่ขอบบวกของลำดับในแผนภาพที่ 4
กระบวนการแบ่งความถี่ดั้งเดิมด้วยสองแบบดิจิทัลมี คุณสมบัติที่สำคัญ: โดยไม่คำนึงถึงประเภท (ความสัมพันธ์ชั่วคราวของพัลส์และการหยุดชั่วคราว) ของสัญญาณพัลส์อินพุต ในลำดับที่ได้รับจากการหาร ระยะเวลาของพัลส์และการหยุดชั่วคราวจะเท่ากัน (ดูแผนภาพ 7 และ 6 ในรูปที่ 101)
เอาต์พุต Q ของทริกเกอร์ DD2 เชื่อมต่อกับหนึ่งในอินพุตขององค์ประกอบ DD3 และเอาต์พุตผกผัน (-Q) เชื่อมต่อกับหนึ่งในอินพุตขององค์ประกอบลอจิก DD4 องค์ประกอบอินพุตสองตัว DD3 และ DD4 ดำเนินการฟังก์ชันตรรกะ AND องค์ประกอบประเภทนี้จะสร้างสัญญาณระดับลอจิคัลสูงที่พินเอาท์พุตในกรณีที่อินพุตทั้งหมดมีระดับสูงเช่นกัน สำหรับการรวมกันของระดับลอจิคัลอื่น ๆ ที่อินพุตขององค์ประกอบ AND เอาต์พุตจะยังคงต่ำ อินพุตทั้งหมดขององค์ประกอบลอจิกมีผลกระทบเหมือนกันต่อการก่อตัวของสัญญาณเอาท์พุตนั่นคือเท่ากัน หากมีการใช้ระดับลอจิคัลสูงกับอินพุตตัวใดตัวหนึ่งอย่างต่อเนื่อง มันจะอนุญาตและจะไม่ส่งผลกระทบต่อการส่งผ่านของสัญญาณจากอินพุตที่สองผ่านองค์ประกอบ มิฉะนั้น การเปลี่ยนแปลงทั้งหมดในสัญญาณที่ตั้งไว้ที่อินพุตที่สองจะถูกทำซ้ำที่เอาต์พุตทุกประการ
ในรูปที่ 100 เอาต์พุตของวงจรไมโครวงจร IC 13 เชื่อมต่อกับหนึ่งในอินพุตขององค์ประกอบ DD3 และ DD4 และสามารถใช้เพื่อบล็อกสัญญาณพัลส์ที่มาถึงองค์ประกอบ DD3 และ DD4 จากเอาต์พุตของทริกเกอร์ DD2 การบล็อกทำได้โดยการใช้สัญญาณระดับลอจิกต่ำกับพินนี้ ในแผนภาพวงจรนี้ รูปที่ 100 พิน IC 13 เชื่อมต่ออย่างถาวรกับ IC 14 - เอาต์พุตของแหล่งจ่ายแรงดันอ้างอิงภายใน ศักยภาพนี้เป็นตัวเปิดใช้งานอย่างต่อเนื่องสำหรับลำดับที่จะส่งผ่านจากเอาต์พุตฟลิปฟล็อปไปยังเอาต์พุต DD3 และ DD4 ดังนั้นรูปแบบแรงดันไฟฟ้าที่อินพุตและเอาต์พุตขององค์ประกอบ DD3 และ DD4 ตามลำดับจะเหมือนกัน (แผนภาพ 9 และ 8 รูปที่ 101)ในกรณีนี้ องค์ประกอบเหล่านี้จะทำหน้าที่ขององค์ประกอบบัฟเฟอร์และตัวทำซ้ำ
องค์ประกอบสุดท้ายที่ติดตั้งในวงจรสร้างสัญญาณ PWM คือองค์ประกอบสองอินพุต DD5 และ DD6 อินพุตหนึ่งขององค์ประกอบเหล่านี้เชื่อมต่อกับ DD3 และ DD4 ตามลำดับ และอินพุตอีกคู่ขององค์ประกอบ DD5 และ DD6 จะรวมเข้าด้วยกันและเชื่อมต่อกับเอาต์พุตของ DD1 องค์ประกอบ DD5 และ DD6 ใช้เพื่อดำเนินการฟังก์ชันลอจิคัลของประเภท NOR องค์ประกอบเหล่านี้ดำเนินการเชิงตรรกะคล้ายกับ DD1 แต่ยังเพิ่มการปฏิเสธ ซึ่งในเทคโนโลยีดิจิทัลเทียบเท่ากับการผกผัน สัญญาณระดับต่ำจะปรากฏที่เอาต์พุตขององค์ประกอบลอจิก NOR เมื่อมีอินพุตอย่างน้อยหนึ่งอินพุตถูกตั้งค่าเป็นแรงดันไฟฟ้าระดับสูง ถ้าสำหรับสองอินพุทหรืออิลิเมนต์ (OR-NOT) มีการแนะนำความแตกต่างเชิงนามธรรมระหว่างอินพุทกับอินพุทหนึ่งถูกพิจารณาว่าเป็นข้อมูล และอันที่สองนั้นได้รับอนุญาต เราสามารถสรุปได้ว่าเพื่อให้ข้อมูลส่งผ่านจากอินพุทแรกไปยัง เอาต์พุตขององค์ประกอบจะต้องได้รับอนุญาตที่อินพุต ระดับแรงดันไฟฟ้าถูกตั้งค่าไว้ที่ต่ำ เมื่อใช้ระดับสูงกับอินพุตที่เปิดใช้งาน ข้อมูลจะถูกบล็อก และเอาต์พุตจะต่ำเสมอ นี่เป็นเรื่องจริงสำหรับตรรกะการทำงานขององค์ประกอบ OR-NOT
ที่อินพุตของ DD5 มีสัญญาณที่มาจากเอาต์พุตของ DD1 (ดูแผนภาพที่ 4 ในรูปที่ 101 และ DD3 (ดูแผนภาพที่ 7) จากผลการเพิ่มทางตรรกะของอินพุตเหล่านี้มีอิทธิพลต่อการผกผัน สัญญาณที่แสดงในแผนภาพ 8 ปรากฏที่เอาต์พุตขององค์ประกอบ DD5 ในทำนองเดียวกัน แผนภาพ 9 แสดงรูปร่างของพัลส์ที่ได้รับที่เอาต์พุตขององค์ประกอบ DD6 พัลส์ที่มีขั้วบวกจะถูกส่งไปยังเอาต์พุต DD5 และ DD6 เมื่อสัญญาณอินพุตทั้งสองสำหรับแต่ละองค์ประกอบเหล่านี้ใช้ค่าระดับต่ำ .
จากแผนภาพที่ 4, 8 และ 9 เห็นได้ชัดว่าเอาต์พุตขององค์ประกอบคือ DD5 และ DD6 พัลส์สลับของลำดับของแผนภาพ 4 จะปรากฏขึ้น พัลส์การทำงานในแผนภาพ 4 จะถือเป็นช่วงเวลาซึ่งมีขอบเขตที่กำหนดโดยการลดลงและด้านหน้านั่นคือจุดเริ่มต้นของพัลส์คือการลดลงของ แรงดันบวกและจุดสิ้นสุดคือขอบบวก หนึ่งพัลส์จากเอาต์พุตของ DD1 ไปที่เอาต์พุตขององค์ประกอบ DD5 และสัญญาณอินพุตไปยัง DD6 จะถูกบล็อกในขณะนี้ ระดับสูงซึ่งจ่ายมาจากเอาต์พุตแบบกลับหัวของทริกเกอร์ DD2 พัลส์ถัดไปจากลำดับที่เอาต์พุตของ DD1 จะปรากฏที่เอาต์พุตของ DD6 และใน DD5 จะถูกบล็อกโดยระดับสูงที่มาจากเอาต์พุตโดยตรงของทริกเกอร์ DD2 ที่เอาต์พุตขององค์ประกอบลอจิกแต่ละตัว DD5 และ DD6 พัลส์จะปรากฏขึ้นตามลำดับจากลำดับที่เกิดขึ้นที่เอาต์พุตของ DD1
พัลส์สองลำดับจะถูกสร้างขึ้นที่เอาต์พุต DD5 และ DD6 อัตราการทำซ้ำของพัลส์ในแต่ละอันนั้นต่ำกว่าความถี่ของแรงดันฟันเลื่อยบนตัวเก็บประจุ C18 ถึงสองเท่า พัลส์ขั้วบวกของทั้งสองลำดับจะมีระยะห่างจากกันตามเวลา กล่าวคือ ช่วงการกระทำของทั้งสองลำดับจะไม่ตัดกัน ถัดไป แต่ละซีเควนซ์ใช้เพื่อควบคุมทรานซิสเตอร์ของตัวเองของแอมพลิไฟเออร์สวิตชิ่งฮาล์ฟบริดจ์ สิ่งสำคัญมากคือปัญหาของการสร้างลำดับพัลส์ที่ถูกต้องเพื่อการกระตุ้น วงจรทรานซิสเตอร์เพาเวอร์แอมป์จึงจำเป็นต้องพิจารณาบางกรณีของการทำงานของวงจรจ่ายไฟและการตอบสนองขององค์ประกอบ IC ต่อสิ่งเหล่านี้
ตำแหน่งชั่วคราวของพัลส์ถูกกำหนดโดยรูปร่างของแรงดันไฟฟ้าของฟันเลื่อยอย่างเคร่งครัด การลดลงของพัลส์ในแต่ละลำดับจะถูกซิงโครไนซ์กับการลดลงของแรงดันไฟฟ้าที่เพิ่มขึ้นเชิงเส้นที่สร้างโดยเครื่องกำเนิดไมโครเซอร์กิต ตำแหน่งชั่วคราวของการลดลงไม่เปลี่ยนแปลง หากเราพิจารณาแผนภาพที่ 3 เราจะสังเกตได้ว่าตำแหน่งของการสลายตัวของพัลส์ที่สร้างโดยตัวเปรียบเทียบ PWM (ดูแผนภาพที่ 4) ขึ้นอยู่กับอัตราส่วนกระแสของค่าแรงดันไฟฟ้า "เลื่อย" และแรงดันไฟฟ้าที่ไม่ตรงกัน การลดลงของระดับแรงดันไฟฟ้าที่ไม่ตรงกันในแผนภาพ 4 ทำให้เกิด "การเลื่อน" ของการโจมตีของพัลส์ไปทางซ้าย ตำแหน่งของด้านหน้าของพัลส์นี้นั่นคือจุดสิ้นสุดของมันจะถูกกำหนดอย่างเคร่งครัดโดยช่วงเวลาการสลายตัวของแรงดันฟันเลื่อยดังนั้นระยะเวลาจึงเพิ่มขึ้น ความถี่ของพัลส์ไม่เปลี่ยนแปลงและระยะเวลาจะถูกควบคุมโดยระดับเอาต์พุตของแอมพลิฟายเออร์ข้อผิดพลาด DA3
ที่จุดเริ่มต้นของคำอธิบายการทำงานของตัวแปลง PWM มีการกล่าวถึงตัวเปรียบเทียบที่เรียกว่า "โซนตาย" (ดูแผนภาพ 1 และ 2) ตอนนี้มันก็ชัดเจนแล้ว กลไกทั่วไปการทำงานของวงจรโมดูเลเตอร์ความกว้างพัลส์ทั้งหมดควรอธิบายความจำเป็นในการมีวงจรประเภทนี้
องค์ประกอบ DD1 ดำเนินการเพิ่มสัญญาณพัลส์แบบลอจิคัลจากตัวเปรียบเทียบ DA1 และ DA2 ก่อนหน้านี้ สันนิษฐานว่าพัลส์บวกของตัวเปรียบเทียบ DA2 มีความกว้างมากกว่าพัลส์เอาต์พุตที่คล้ายกันจาก DA1 อย่างไรก็ตาม หากกระบวนการลดพัลส์จาก DA2 เริ่มต้นขึ้น เมื่อใด ระดับศูนย์สัญญาณจาก DA1 ในกรณีที่รุนแรง ระดับต่ำคงที่จะถูกสร้างขึ้นที่เอาต์พุตของ DD1 ทริกเกอร์ DD2 จะไม่สามารถสลับเอาต์พุตได้ และระดับลอจิคัลตรงกันข้ามอย่างถาวรจะปรากฏบน DD5 และ DD6 สิ่งนี้จะหยุดกระบวนการสวิตชิ่งของทรานซิสเตอร์สเตจกำลัง เพื่อป้องกัน สถานการณ์ที่คล้ายกันมีจุดประสงค์เพื่อใช้ตัวเปรียบเทียบ "โซนตาย" เมื่อพัลส์จาก DA2 แคบลง ช่วงเวลาหนึ่งจะมาถึงเมื่อระยะเวลาของพัลส์บวกจาก DA1 กลายเป็นตัวกำหนดเมื่อเพิ่มสัญญาณที่มาถึงอินพุตของ DD1 พัลส์บวกที่เอาต์พุต DD1 ไม่สามารถแคบกว่าพัลส์เอาท์พุตของตัวเปรียบเทียบ "โซนตาย" หากคุณติดตามพฤติกรรมของส่วนดิจิทัลของวงจรในกรณีนี้คุณจะเห็นว่าเป็นผลมาจากการแปลงลำดับของค่าบวก พัลส์จะปรากฏที่เอาต์พุต DD5 และ DD6 ระยะเวลาจะตรงกับการหยุดชั่วคราว (ศูนย์ตรรกะ) ในแผนภาพ 2 การหยุดชั่วคราวระหว่างพัลส์เหล่านี้จะเท่ากับระยะเวลาของพัลส์บวกในแผนภาพ 2 ซึ่งหมายความว่าโหนดบน รับประกันตัวเปรียบเทียบ "โซนตาย" เพื่อให้แน่ใจว่าตัวแปลงลำดับจะปรากฏในขั้นตอนเอาต์พุตของพัลส์ PWM พร้อมช่วงเวลาหยุดชั่วคราวที่ระบุระหว่างพัลส์ กลไกการออกฤทธิ์นี้ช่วยให้คุณเพิ่มการจ่ายพลังงานไปยังวงจรทุติยภูมิและดำเนินการ PWM ต่อ กระบวนการควบคุมโดยใช้เครื่องขยายเสียง DA3 และเครื่องเปรียบเทียบ DA2 การหยุดชั่วคราวที่เกิดขึ้นเนื่องจากการมีแหล่งกำเนิด 100 mV ที่อินพุต DA1 ช่วยลดการปรากฏตัวของกระแสในทรานซิสเตอร์กำลังของเพาเวอร์แอมป์
การปรากฏตัวของสัญญาณพัลส์ที่เอาต์พุตขององค์ประกอบ DD5 และ DD6 จะสิ้นสุดการประมวลผลเชิงตรรกะของสัญญาณที่ไม่ตรงกันและการสร้างลำดับ PWM ในตัวแปลง ลักษณะที่ปรากฏของลำดับพัลส์เหล่านี้จะยังคงไม่เปลี่ยนแปลงจนกว่าจะนำไปใช้กับองค์ประกอบกำลังของเพาเวอร์แอมป์ ขั้นตอนทั้งหมดที่ติดตั้งระหว่างเอาต์พุตขององค์ประกอบ DD5, DD6 และวงจรฐานของทรานซิสเตอร์ขยายกำลังมีจุดประสงค์เพื่อเพิ่มลักษณะพลังงานของพัลส์ควบคุมและตรงกับระดับเท่านั้น
ทรานซิสเตอร์ภายใน VT1 และ VT2 ของชิป IC ใช้สำหรับการขยายปฐมภูมิของลำดับการควบคุมพัลส์ที่จ่ายให้กับฐาน (ดูแผนภาพ 10 และ 11 รูปที่ 101) จากองค์ประกอบ DD5 และ DD6 ขั้วของทรานซิสเตอร์เหล่านี้ไม่มี การเชื่อมต่อภายในไปยังวงจรต้านทานโหลดใดๆ พวกมันถูกปล่อยให้ว่างโดยเฉพาะสำหรับการใช้ทรานซิสเตอร์ใน ตัวเลือกต่างๆวงจรสวิตชิ่ง
การเชื่อมต่อโดยตรงของทรานซิสเตอร์เอาท์พุตของชิป TL494 กับหม้อแปลงไฟฟ้านั้นไม่ค่อยได้ใช้ โดยปกติแล้วจะใช้ขั้นตอนการขยายระดับกลางซึ่งสร้างขึ้นจากทรานซิสเตอร์เช่นประเภท 2SC945 ในกรณีนี้ตัวส่งสัญญาณของทรานซิสเตอร์ VT1 และ VT2 ของไมโครวงจร (9,10) เชื่อมต่อกันและตัวสะสม (8 และ 11) มีการเชื่อมต่อหม้อแปลงกับเพาเวอร์แอมป์ นี่เป็นแนวทางดั้งเดิมในการสร้างวงจรจับคู่สำหรับหน่วยควบคุมแรงดันต่ำ พลังงานค่อนข้างต่ำ และสเตจกำลังไฟฟ้าแรงสูง การดำเนินการตามแนวทางนี้มีดังต่อไปนี้ พัลส์แรงดันไฟฟ้าสี่เหลี่ยม (ดูแผนภาพ 12,13 รูปที่ 101) บนตัวสะสมของทรานซิสเตอร์ VT1 และ VT2 จะถูกส่งไปยังฐานของทรานซิสเตอร์สองตัว (ไม่แสดงในรูปที่ 100) ตัวสะสมและตัวปล่อยซึ่งเชื่อมต่อกับ ขดลวดปฐมภูมิ (วงจรที่มีจุดกึ่งกลาง) TV2 หม้อแปลงความถี่สูงที่จับคู่พลังงานต่ำ พัลส์แรงดันไฟฟ้ารูปสี่เหลี่ยมผืนผ้าจากขดลวดทุติยภูมิของหม้อแปลงนี้จะถูกส่งไปยังอินพุตของทรานซิสเตอร์กำลังสูงที่รวมอยู่ในขดลวดปฐมภูมิของหม้อแปลงไฟฟ้ากำลัง TV1 (วงจรที่มีจุดกึ่งกลาง) จากขดลวดทุติยภูมิซึ่งจ่ายแรงดันไฟฟ้าผ่านวงจรเรียงกระแส (s) และการปรับให้เรียบ (f) ตัวกรองให้กับผู้ใช้พลังงานไฟฟ้า
ดังนั้นน้ำตกที่พิจารณาจะทำหน้าที่ขยายระดับและกำลังของสัญญาณพัลส์ IC (แผนภาพ 12,13, รูปที่ 101) ให้อยู่ในระดับที่เพียงพอในการเริ่มต้นแอมพลิฟายเออร์ฮาล์ฟบริดจ์ (หรือทำตามวงจรอื่น) และรักษาแรงดันไฟฟ้า ที่ผู้บริโภคภายในช่วงที่กำหนดการกระทำของปัจจัยรบกวน
ในหม้อแปลงไฟฟ้ากำลังแบบพัลซิ่ง ทรานซิสเตอร์ประเภท 2SC945 หรือแอนะล็อกเชิงฟังก์ชันมักจะรวมอยู่ในขดลวดปฐมภูมิของหม้อแปลงไฟฟ้ากำลัง TV1 มีการใช้กันอย่างแพร่หลายโดยไม่คำนึงถึงผู้ผลิตผลิตภัณฑ์ จำกัดค่าหลัก พารามิเตอร์ทางเทคนิคทรานซิสเตอร์ที่กำหนดมีดังนี้
· กำลังกระจายสูงสุด – 250 mW;
· แรงดันไฟฟ้าฐานสะสม – 60 V;
· แรงดันไฟสะสม-ตัวปล่อย – 50 V;
· แรงดันไฟฟ้าฐานตัวส่งสัญญาณ – 5 V;
·กระแสสะสม – 100 mA;
· กระแสไฟฟ้าพื้นฐาน – 20 mA;
· ค่าเกนทั่วไปในวงจรที่มีตัวปล่อยร่วมคือ 185-200
· ความจุไฟฟ้าโดยทั่วไปของจุดเชื่อมต่อฐานสะสม – 3 pF;
· ค่าทั่วไปของความถี่เกนที่เป็นเอกภาพ f t – 250 MHz
ตามการจำแนกในประเทศ จัดอยู่ในตระกูลทรานซิสเตอร์ ความถี่สูงและพลังงานต่ำ
ข้าว. 40
ข้าว. 39
ข้าว. 38
ข้าว. 37
หมายเหตุ - รายละเอียดเพิ่มเติมเกี่ยวกับไมโครวงจรและหลักการทำงานของมันแสดงเพิ่มเติมในย่อหน้าที่ 2.4.2 - ตัวควบคุม PWM บนไอซี TL494
การสลับตัวปรับแรงดันไฟฟ้าตาม IC TL494
แรงดันไฟฟ้าทางลาดมักจะได้รับจากอุปกรณ์แยกต่างหาก - เครื่องกำเนิดแรงดันไฟฟ้าทางลาด (RVG)
ความถี่ของแรงดันไฟฟ้าฟันเลื่อยถูกกำหนดโดย อาร์.ซี.โซ่และโดยปกติ ฉจีพีเอ็น = ค่าคงที่แต่หากจำเป็นให้เปลี่ยนพารามิเตอร์ อาร์.ซี.คุณสามารถตั้งค่า (ปรับ) ความถี่ที่ต้องการได้
เป็นที่ทราบกันว่าความถี่ในการสวิตชิ่งของอุปกรณ์สวิตชิ่งคือทรานซิสเตอร์ เวอร์มอนต์ 2, เวอร์มอนต์ 3 ใน ISN ที่มี PWM จะเป็นค่าคงที่ (กำหนดโดย GPG) ภายใต้อิทธิพลของปัจจัยที่ไม่เสถียร แรงดันไฟฟ้าของตัวต้านทานภายนอกจะเปลี่ยนไป ร 9 และที่เอาต์พุตของแอมพลิฟายเออร์ดิฟเฟอเรนเชียลตามลำดับ ยู pt ซึ่งนำไปสู่การเปลี่ยนแปลงระยะเวลา สถานะเปิดทรานซิสเตอร์ เวอร์มอนต์ 2, เวอร์มอนต์ตัวควบคุม 3 ตัวและแรงดันไฟฟ้าที่เอาต์พุตของตัวป้องกันพัลส์ยังคงไม่เปลี่ยนแปลง
3.7.3 คอนโทรลเลอร์ PWM ซีรีส์ TL494
ปัจจุบันวงจรไมโคร (ในประเทศและนำเข้า) มีวางจำหน่ายอย่างกว้างขวางในตลาด ซึ่งใช้ชุดฟังก์ชันการควบคุม PWM ที่แตกต่างกันสำหรับ งานเฉพาะ. ตัวควบคุม PWM ของซีรีส์ TL494 (อะนาล็อกในประเทศของ KR1114EU4) ได้พิสูจน์ตัวเองเป็นอย่างดี ของพวกเขา คำอธิบายโดยละเอียดที่กำหนดไว้ใน . วงจรไมโครเหล่านี้ช่วยเพิ่มขีดความสามารถในการพัฒนาระบบจ่ายไฟและใช้ฟังก์ชันควบคุม PWM ครบชุด ไมโครเซอร์กิตสร้างแรงดันอ้างอิง, ขยายสัญญาณข้อผิดพลาด, สร้างแรงดันฟันเลื่อย, การมอดูเลต PWM, สร้างเอาต์พุตแบบพุช-พูล, การป้องกันกระแสและโอเวอร์โหลด, การซิงโครไนซ์ภายนอก หลากหลายการปรับให้เริ่มต้นอย่างนุ่มนวลและความเป็นไปได้ในการเปิดใช้งานภายนอก
พารามิเตอร์หลักและลักษณะของชิป TL494:
· แรงดันไฟจ่าย Uсс – 7…40 V;
แรงดันไฟฟ้าบนตัวสะสมแบบปิด ทรานซิสเตอร์ที่สำคัญไม่เกิน 40 โวลต์;
· กระแสของทรานซิสเตอร์หลักเอาต์พุต – 250 mA;
· แรงดันอ้างอิง – 5 V ± 5%;
· พลังทั่วไปการกระจายในโหมดต่อเนื่อง (กรณี DIP-16.T<25 ºС) – не более 1000 мВт;
ช่วงอุณหภูมิในการทำงาน:
· มีคำต่อท้าย L – จาก −25…+85 ºС;
· มีคำต่อท้าย C – จาก 0…+70 ºС
· กระแสไฟฟ้าผ่านเอาต์พุตป้อนกลับ – ไม่เกิน 0.3 mA
· ความจุของตัวเก็บประจุไทม์มิ่ง St – 0.047…10,000 nF;
· ความต้านทานของตัวต้านทานไทม์มิ่ง – 1.8..500 kOhm;
· ความถี่เครื่องกำเนิดไฟฟ้า – 1…300 kHz;
· การใช้กระแสไฟของวงจรไมโคร - ไม่เกิน 20 mA;
· ด้านหน้าของพัลส์กระแสเอาต์พุต – ไม่เกิน 200 ns
· กระแสพัลส์เอาต์พุตลดลง – ไม่เกิน 100 ns
นอกจากนี้ ตัวขับเอาท์พุตทรานซิสเตอร์อิสระของไมโครวงจรยังให้ความสามารถในการใช้งานสเตจเอาท์พุตโดยใช้วงจรตัวปล่อยทั่วไปหรือวงจรตัวติดตามตัวปล่อย
3.1.1. แผนผังของสเต็ปดาวน์พัลส์
โคลงบน IC TL494
ในข้อเสนอเมื่อ ข้าว. 37 โคลง แรงดันไฟฟ้าขาเข้าสูงสุดคือ 30 V ซึ่งถูกจำกัดโดยแรงดันไฟฟ้าจากแหล่งเดรนสูงสุดที่อนุญาตของทรานซิสเตอร์เอฟเฟกต์สนาม p-channel เวอร์มอนต์ 1 RFP60P03 จาก Mitsubishi Electric ตัวต้านทาน ร 3 และตัวเก็บประจุ กับ 6 ตั้งค่าความถี่ของเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อยภายในโดยพิจารณาจากสูตร

บน ข้าว. 37 ระบุว่า: วีดี 1-KD212A; วีดี 2-2D2998B; เวอร์มอนต์ 1-RFP60PO3; ค 1, C2-2200μ×40V; ค 3-10μ×63V; ค 4-0.1 ไมครอน; ค 5-1,000μ×25V; ค 6-4700;ค 7-0.1 ไมครอน; เอฟ.ยู. 1-MF อาร์400; ร 1-200 โอห์ม, 0.125 วัตต์; ร 2-510 โอห์ม 0.5 วัตต์; ร 3-30 โอห์ม, 0.125 วัตต์; ร 4-1 ม., 0.125 วัตต์; ร 5-47 โอห์ม, 0.125 วัตต์; ร 6-4.7 โอห์ม, 0.125 วัตต์; ร 7-4.7 โอห์ม; ร 8-5.6 โอห์ม, 0.125 วัตต์; ร 9-1 โอห์ม, 0.125 วัตต์; ล 1-80 µH; I-6 เอ; อยูน =24 โวลต์; เอาท์พุต =0…11 โวลต์
จากแหล่งจ่ายแรงดันอ้างอิง (พิน 14) ผ่านตัวแบ่งตัวต้านทาน ร 6, ร 7 ส่วนหนึ่งของแรงดันอ้างอิงจะจ่ายให้กับอินพุตกลับด้านของตัวขยายข้อผิดพลาดหมายเลข 1 (พิน 2) สัญญาณตอบรับผ่านตัวแบ่ง ร 8, ร 9 ถูกส่งไปยังอินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาด (พิน 1) ของไมโครวงจร แรงดันไฟขาออกถูกควบคุมโดยตัวต้านทาน ร 7. ตัวต้านทาน ร 5 และตัวเก็บประจุ กับ 7 ทำการแก้ไขความถี่ของตัวขยายข้อผิดพลาด
ควรสังเกตว่าเป็นอิสระ ไดรเวอร์เอาท์พุตของไมโครเซอร์กิตช่วยให้มั่นใจได้ถึงการทำงานของสเตจเอาท์พุตทั้งในโหมดพุชพูลและโหมดรอบเดียว ในโคลงไดรเวอร์เอาต์พุตของวงจรไมโครจะเปิดในโหมดรอบเดียวในการดำเนินการนี้ให้เชื่อมต่อพิน 13 เข้ากับสายทั่วไป ทรานซิสเตอร์เอาต์พุตสองตัว (ตัวสะสม - พิน 8, 11; ตามลำดับ, ตัวส่งสัญญาณ - พิน 9, 10) เชื่อมต่อกันตามวงจรตัวส่งสัญญาณทั่วไปและทำงานแบบขนาน ในกรณีนี้ความถี่เอาต์พุตจะเท่ากับความถี่ของเครื่องกำเนิด ระยะเอาท์พุตของวงจรไมโครผ่านตัวแบ่งตัวต้านทาน ร 1, ร 2 ควบคุมองค์ประกอบหลักของโคลง FE - ทรานซิสเตอร์เอฟเฟกต์สนาม เวอร์มอนต์ 1. ในวงจรกำลังของไมโครวงจร (พิน 12) เพื่อระงับสัญญาณรบกวนความถี่สูงต่างๆ และการทำงานของโคลงโดยรวมมีเสถียรภาพมากขึ้น แอล.ซี.- กรององค์ประกอบ ล 1, ค 3, ค 4. ดังที่เห็นได้จากแผนภาพวงจรของโคลงเมื่อใช้ชิป TL494 จำเป็นต้องมีองค์ประกอบภายนอกจำนวนค่อนข้างน้อย
ฟิวส์รีเซ็ตตัวเองใช้เพื่อป้องกันโคลงจากกระแสไฟเกิน เอฟ.ยู. MF-R400 1 ลำจาก Bourns หลักการทำงานของฟิวส์ดังกล่าวขึ้นอยู่กับคุณสมบัติของการเพิ่มความต้านทานอย่างรวดเร็วเมื่อเกินค่าเกณฑ์หนึ่งของอุณหภูมิปัจจุบันหรืออุณหภูมิโดยรอบ และจะคืนคุณสมบัติโดยอัตโนมัติเมื่อสาเหตุเหล่านี้ถูกกำจัด ด้านล่างนี้เป็นข้อกำหนดทางเทคนิคของฟิวส์ข้างต้น:
· แรงดันไฟฟ้าใช้งานสูงสุด – 30 V;
· กระแสสูงสุดที่ไม่นำไปสู่การเปลี่ยนแปลงพารามิเตอร์ฟิวส์ - 4 A;
· กระแสไฟฟ้าที่นำไปสู่การกระโดดของความต้านทาน – 8 A;
· ช่วงอุณหภูมิในการทำงาน – ตั้งแต่ −40 ถึง +85 ºС
สามารถลดการสูญเสียการสลับและเพิ่มประสิทธิภาพของโคลงได้ด้วยการใช้ไดโอด Schottky ( วีดี 2) KD2998B พร้อมพารามิเตอร์:
· แรงดันไปข้างหน้าคงที่ – 0.54 V;
· กระแสไปข้างหน้าเฉลี่ย – 30 A;
· ช่วงความถี่โดยไม่ลดพารามิเตอร์ทางไฟฟ้า – 10..200 kHz;
· แรงดันย้อนกลับแบบพัลส์ – 30 V.
ลักษณะทางเทคนิคหลักของโคลงแบบสเต็ปดาวน์ (รูปที่ 37)
· แรงดันไฟฟ้าขาเข้า – 24 โวลต์;
· แรงดันเอาท์พุต – 0…11 โวลต์;
· กระแสโหลดสูงสุด – 6 A;
· แอมพลิจูดระลอกแรงดันเอาต์พุต – ไม่เกิน 100 mV;
· ความไม่เสถียรของเอาท์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม – ไม่เกิน 1%
· ค่าประสิทธิภาพเฉลี่ยที่กระแสโหลดสูงสุดตลอดช่วงแรงดันเอาต์พุตทั้งหมดคือประมาณ 90%
จากการทดลองพบว่าโคลงมีประสิทธิภาพสูงสุด (ประมาณ 90%) ที่ความถี่ 12 kHz แต่ที่กำลังขับประมาณ 40 W จะสังเกตเห็นเสียงนกหวีดที่แทบจะสังเกตไม่เห็นได้ นกหวีดจะหายไปหากคุณเพิ่มความถี่การแปลงเป็น 20 kHz (โดยประสิทธิภาพลดลง 2...3%) ประสิทธิภาพที่กำลังเอาท์พุตสูงถึง 10 W (U out = 10 V) ถึง 93%
ตัวเหนี่ยวนำ L2 ถูกพันบนแกนแม่เหล็กวงแหวน MP-140 K24×13×6.5 สองตัวที่พับเข้าด้วยกันและมีลวด PETV-2 45 รอบที่มีเส้นผ่านศูนย์กลาง 1.1 มม. วางเท่า ๆ กันในสองชั้นรอบปริมณฑลทั้งหมดของวงแหวน ระหว่างชั้นควรวางผ้าเคลือบเงา LShMS-105-0.06 GOST 2214-78 สองชั้น ความเหนี่ยวนำของโช้คคือ 220 µH ตัวต้านทาน – C2-33N. ตัวเก็บประจุ กับ 1, กับ 2, กับ 3, กับ 5 – K50-35, กับ 4, กับ 6, กับ 7 – K10-17. ตัวต้านทานแบบปรับได้ - SP5-3 หรือ SP5-2VA สามารถเปลี่ยนชิป TL494CN ด้วย TL494LN หรือ KR1114EU4 ได้ คันเร่ง ล 1 – DM-0.1 ที่มีความเหนี่ยวนำ 80 μH สามารถเลือกฟิวส์รีเซ็ตตัวเองซีรีส์ MF-R ได้สำหรับแต่ละกรณี ไดโอด วีดี 2 สามารถแทนที่ด้วยไดโอด Schottky อื่น ๆ ที่มีพารามิเตอร์ไม่แย่ไปกว่าที่กล่าวมาข้างต้น เช่น 20TQ045
ในตัวกันโคลง สามารถออกแบบยูนิตป้องกันกระแสเกินให้แตกต่างออกไปได้ TL494 มีตัวขยายข้อผิดพลาด #2 (การกลับด้าน I/O 15, การไม่กลับด้าน I/O 16) เอาต์พุตของแอมพลิฟายเออร์ข้อผิดพลาดทั้งสองมีแอ็คทีฟสูงและ ORed ที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM ในการกำหนดค่านี้ แอมพลิฟายเออร์ที่ต้องใช้เวลาน้อยที่สุดในการเปิดเอาต์พุตคือแอมพลิฟายเออร์ที่โดดเด่นในลูปเกน
ส่วนของวงจรโคลงพร้อมหน่วยป้องกันกระแสเกินจะแสดงขึ้นมา ข้าว. 38 .
ตัวต้านทานแบบขนาน ร 12-ร 14 ทำหน้าที่เป็นเซ็นเซอร์กระแสไฟฟ้าเชื่อมต่อแบบอนุกรมกับโหลด แรงดันไฟฟ้าจากเซ็นเซอร์ปัจจุบันจะถูกส่งไปยังอินพุตที่ไม่กลับด้าน (พิน 16) ของแอมพลิฟายเออร์ข้อผิดพลาดหมายเลข 2 ค่าเกณฑ์ปัจจุบัน (แรงดันไฟฟ้าที่อินพุตกลับด้านของแอมพลิฟายเออร์พิน 15) ในโหลดถูกตั้งค่าโดยตัวแบ่ง ร 10, ร 11.
บน ข้าว. 38 ระบุว่า: วีดี 2-2D2998B; ค 5-1,000μ×25V; ค 6-4700;ค 7-0.1 ไมครอน; ร 3-30 โอห์ม, 0.125 วัตต์; ร 4-1 ม., 0.125 วัตต์; ร 5-47 โอห์ม, 0.125 วัตต์; ร 6-4.7 โอห์ม, 0.125 วัตต์; ร 7-4.7 โอห์ม; ร 8-5.6 โอห์ม, 0.125 วัตต์; ร 9-1 โอห์ม, 0.125 วัตต์; ร 10-4.7 โอห์ม, 0.125 วัตต์; ร 11-270 โอห์ม; ร 12, ร 13, ร 14-0.1 โอห์ม, 1 วัตต์; ล 1-80 µH; I-6 เอ; ยูเอาท์ = 0…11 V.
ทันทีที่กระแสในโหลดเกินค่าเกณฑ์ที่ตั้งไว้และตัวขยายข้อผิดพลาดหมายเลข 2 ของวงจรไมโครมีความโดดเด่นในลูปควบคุม โคลงจะเริ่มทำงานในโหมดเสถียรภาพปัจจุบัน หากกระแสโหลดน้อยกว่าค่าเกณฑ์ โคลงจะสลับไปที่โหมดรักษาแรงดันไฟฟ้าอีกครั้ง เพื่อลดการสูญเสียพลังงาน เซ็นเซอร์ปัจจุบันถูกสร้างขึ้นด้วยความต้านทานขั้นต่ำ 0.03 โอห์ม: ที่กระแสโหลดสูงสุด 6 A การกระจายพลังงานของเซ็นเซอร์
เพียง 1.08 วัตต์ ตัวต้านทาน ร 12...ร 14 – ประเภท S5-16MV 1 วัตต์, 0.1 โอห์ม ± 1% ตัวต้านทาน ร 11 – SP5-3 หรือ SP5-2VA หากจำเป็น เพื่อลดการสูญเสีย คุณสามารถลดความต้านทานของเซ็นเซอร์ปัจจุบันเพิ่มเติมได้
โคลงทำบนกระดานขนาด 55x55 มม. ระหว่างการติดตั้ง แนะนำให้แยกสายร่วมของส่วนกำลังของโคลงและสายร่วมของวงจรไมโครและเชื่อมต่อที่เอาต์พุตของโคลง รวมถึงลดความยาวของตัวนำ (โดยเฉพาะส่วนกำลัง) .
ติดตั้งทรานซิสเตอร์บนหม้อน้ำโดยมีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 110 cm2 โคลงไม่จำเป็นต้องมีการปรับเปลี่ยนหากติดตั้งอย่างถูกต้อง ในโคลงที่มีหน่วยป้องกันกระแสเกิน (รูปที่ 38) จำเป็นต้องตั้งค่าแรงดันไฟฟ้าที่พิน 15 ของไมโครวงจรซึ่งคำนวณโดยสูตร: U 15 = I × R โดยที่ I คือกระแสโหลดสูงสุด ร– ความต้านทานของเซ็นเซอร์ปัจจุบัน
เริ่มแรกโดยไม่มีโหลดตัวต้านทาน ร 11 จำเป็นต้องตั้งค่าแรงดันไฟฟ้าที่ต้องการ ยูสำหรับกระแสโหลดสูงสุด (สำหรับ Ipore ปัจจุบัน = 8 A, U = 0.24 V) จะดีกว่าถ้าเปิดครั้งแรกด้วยโหลด 0.2...0.4 A จากนั้นค่อย ๆ เพิ่มแรงดันเอาต์พุตเป็นค่าสูงสุด จากนั้นเพิ่มกระแสโหลด ตรวจสอบการเปลี่ยนของโคลงไปยังโหมดรักษาเสถียรภาพปัจจุบัน
แทนที่จะใช้ทรานซิสเตอร์ RFP60P03 คุณสามารถใช้ RFP10P03 ที่ถูกกว่าได้ แต่การใช้ฐานองค์ประกอบที่ถูกกว่าอาจทำให้ลักษณะทางเทคนิคของโคลงลดลง
3.1.2 แผนผังของการเพิ่มพัลส์
โคลงบน IC TL494

ในบางกรณี แรงดันเอาต์พุตของโคลงจะต้องสูงกว่าอินพุต บน ข้าว. 39 แผนภาพบล็อกของตัวเพิ่มเสถียรภาพพัลส์แบบขนานชนิดบูสต์จะแสดงขึ้น
ในตัวป้องกันพัลส์นี้ เมื่อองค์ประกอบหลักของ FE เปิดอยู่ กระแสจากแหล่งกำเนิด ยูอินพุตไหลผ่านคันเร่ง ล 1 กักเก็บพลังงานไว้ในนั้น ไดโอด วีดี 1 ปิดแล้ว. กระแสไฟฟ้าที่โหลดในช่วงเวลานี้มาจากตัวเก็บประจุเท่านั้น กับ 1 .
บน ข้าว. 39 ระบุว่า: วีดี 1-KD212A; วีดี 2-2D2998B; เวอร์มอนต์ 1-IRFP540; ค 1, C2-2200μ×40V; ค 3-10μ×63V; ค 4-0.1 ไมครอน; ค 5, ค 6-3300μ×63V; ค 7-4700; กับ 8-0.1 ไมครอน; กับ 9-1,000 ไมโคร×25 โวลต์; เอฟ.ยู. 1-MF อาร์400; ร 1-1 โอห์ม, 0.25 วัตต์; ร 2-750 โอห์ม 0.25 วัตต์; ร 3-30 โอห์ม, 0.125 วัตต์; ร 4-1 ม., 0.125 วัตต์; ร 5-47 โอห์ม, 0.125 วัตต์; ร 6-4.7 โอห์ม, 0.125 วัตต์; ร 7-4.7 โอห์ม; ร 8-150 โอห์ม, 0.125 วัตต์; ร 9-4.7 โอห์ม, 0.125 วัตต์; ล 1-80 µH; I-1.4 ก; อยูน =24 โวลต์; U ออก = 26.5…50 V.
ในช่วงเวลาถัดมา เมื่อ CE ปิดตัวเหนี่ยวนำพลังงาน ล 1 มอบให้กับโหลด ในกรณีนี้แรงดันไฟขาออกจะมากกว่าแรงดันไฟฟ้าขาเข้า ไม่เหมือนตัวกันโคลง ( ข้าว. 38 ) ที่นี่ตัวเหนี่ยวนำไม่ใช่องค์ประกอบตัวกรองและแรงดันเอาต์พุตจะมากกว่าแรงดันไฟฟ้าอินพุตตามจำนวนที่กำหนดโดยการเหนี่ยวนำของตัวเหนี่ยวนำ ล 1 และรอบหน้าที่ขององค์ประกอบสำคัญของ FE
ในโคลงบน ข้าว. 39 โดยพื้นฐานแล้วองค์ประกอบรังสีเดียวกันนั้นถูกใช้เหมือนกับที่กล่าวไว้ก่อนหน้านี้
ลักษณะทางเทคนิคหลักของบูสต์โคลง:
· แรงดันไฟฟ้าขาเข้า – 24 โวลต์;
· แรงดันเอาท์พุต – 26.5…50 โวลต์;
· กระแสโหลดสูงสุด (ที่ U out = 50 V) – 1.4 A;
· แอมพลิจูดระลอกแรงดันเอาท์พุต – ไม่เกิน 200 mV;
· ความไม่เสถียรของเอาท์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม – 1.5%;
· ค่าประสิทธิภาพเฉลี่ยที่กระแสโหลดสูงสุดตลอดช่วงแรงดันเอาต์พุตทั้งหมดคือประมาณ 9.2%
· ความถี่ในการแปลง – 15 kHz;
· ช่วงอุณหภูมิในการทำงาน – ตั้งแต่ −25 ถึง +85 ºС;
· แอมพลิจูดระลอกคลื่นของแรงดันเอาต์พุตของโคลงที่โหลดสูงสุดคือประมาณ 200 mV
คุณสามารถลดการกระเพื่อมได้โดยการเพิ่มความจุของตัวกรองเอาต์พุต สำหรับการเริ่มต้นที่ "นุ่มนวล" ตัวเก็บประจุจะเชื่อมต่อระหว่างสายสามัญและอินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาดหมายเลข 1 (พิน 1) กับ 9. เพื่อป้องกันโคลงจากกระแสเกิน คุณสามารถใช้ยูนิตการทำงานที่แสดงในรูปที่ 1 38.
คันเร่ง ล 2 เหมือนกับในวงจรโคลงสเต็ปดาวน์ เวอร์มอนต์ 1 – ทรานซิสเตอร์เอฟเฟกต์สนาม n-channel IRF540 พร้อมพารามิเตอร์: Usi = 100 V, Ic = 28 A, Rsi = 0.077 Ohm (ค่าสูงสุด) ตัวต้านทาน – C2-33N. ตัวเก็บประจุ กับ 1, กับ 2, กับ 3, กับ 5, กับ 6, กับ 8, กับ 9 – K50-35; กับ 4, กับ 7, กับ 8 – K10-17. ตัวต้านทานแบบปรับได้ - SP5-3 หรือ SP5-2VA ทรานซิสเตอร์ เวอร์มอนต์ 1 ควรติดตั้งบนหม้อน้ำที่มีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 100 cm2 แน่นอนว่าคุณสามารถใช้ทรานซิสเตอร์เอฟเฟกต์สนาม n-channel ที่ราคาถูกกว่าได้พร้อมกับการเสื่อมสภาพในลักษณะทางเทคนิคของโคลง ควรเปิดใช้งานเป็นครั้งแรกด้วยโหลดเล็กน้อย 0.1...0.2 A และแรงดันเอาต์พุตขั้นต่ำ จากนั้นค่อยๆ เพิ่มแรงดันเอาต์พุตและกระแสโหลดให้เป็นค่าสูงสุด
หากตัวปรับสเต็ปอัพและสเต็ปดาวน์ทำงานจากแหล่งแรงดันไฟฟ้าเดียวกัน ความถี่การแปลงก็สามารถซิงโครไนซ์ได้ แสดงให้เห็นว่าเป็นแผนภาพการซิงโครไนซ์สำหรับไมโครวงจร TL494 สองตัว ในการทำเช่นนี้คุณจะต้องถอดตัวต้านทานไทม์มิ่งและตัวเก็บประจุออกจากตัวกันโคลงทาสและเทอร์มินัลการลัดวงจร 6 และ 14 ของไมโครวงจรและเชื่อมต่อเทอร์มินัล 5 ของไมโครวงจรของตัวกันโคลงทั้งสองเข้าด้วยกัน
ในโช้คโคลงแบบบูสต์ ล 2 ไม่มีส่วนร่วมในการทำให้ระลอกคลื่นของแรงดันไฟฟ้ากระแสตรงเอาท์พุตเรียบขึ้น ในสารเพิ่มความคงตัวชนิดบูสต์สำหรับการกรองแรงดันไฟฟ้ากระแสตรงเอาต์พุตคุณภาพสูงจำเป็นต้องใช้ตัวกรองเอาต์พุตที่มีค่าสูงเพียงพอ ลและ กับ. สิ่งนี้นำไปสู่การเพิ่มน้ำหนักและขนาดของตัวกรองและอุปกรณ์โดยรวม ดังนั้นความหนาแน่นของพลังงานของตัวกันโคลงแบบสเต็ปดาวน์จึงมากกว่าความหนาแน่นของพลังงานของตัวกันโคลงแบบสเต็ปอัพ
3.1.3. แผนผังของพัลส์
โคลงแบบกลับด้านบน IC TL494
แผนผังของตัวกันโคลงแบบพัลส์กลับแสดงอยู่ใน ข้าว. 40. ISN นี้จัดทำขึ้นตามแผนภาพที่ให้ไว้ ในบทที่ 2 §2.2.3
นอกจากนี้เช่นเดียวกับในสเต็ปอัพโคลงตัวเหนี่ยวนำเมื่อ CE เปิดอยู่จะสะสมพลังงานและเมื่อปิดมันจะถ่ายโอนไปยังโหลดอย่างไรก็ตามเนื่องจากลำดับการเชื่อมต่อองค์ประกอบที่แตกต่างกันโคลงจึงมีคุณสมบัติ ของการกลับขั้วของแรงดันไฟเอาท์พุตสัมพันธ์กับแรงดันไฟเข้า
บน ข้าว. 40 ระบุว่า: วีดี 1-KD212A; วีดี 2-2D2998B; เวอร์มอนต์ 1-RFP60PO3; ค 1, C2-2200μ×40V; ค 3-10μ×63V; ค 4-0.1 ไมครอน; ค 5-1,000μ×25V; ค 6-4700;ค 7-220μx40V; กับ 8-0.1 ไมครอน; เอฟ.ยู. 1-MF อาร์400; ร 1-200 โอห์ม, 0.125 วัตต์; ร 2-510 โอห์ม 0.5 วัตต์; ร 3-1 โอห์ม, 0.125 วัตต์; ร 4-4.7 โอห์ม, 0.125 วัตต์; ร 5-30 โอห์ม, 0.125 วัตต์; ร 6-1 โมห์ม, 0.125 วัตต์; ร 7-47 โอห์ม; ร 8-1 โอห์ม, 0.125 วัตต์; ร 9-10 โอห์ม, 0.125 วัตต์; ร 10-1 โอห์ม, 0.125 วัตต์; ร 11-5.6 โอห์ม, 0.125 วัตต์; ล 1-80 µH; I-4.5 A; U อินพุต = 24 V; เอาท์พุต =0…11 โวลต์
ระบบกันโคลงแบบกลับด้านใช้ส่วนประกอบอิเล็กทรอนิกส์แบบเดียวกับที่อธิบายไว้ก่อนหน้านี้
ลักษณะทางเทคนิคหลักของโคลงแบบกลับด้าน:
· แรงดันไฟฟ้าขาเข้า – 24 โวลต์;
· แรงดันไฟเอาท์พุต – 11 โวลต์;
· กระแสโหลดสูงสุด – 4.5 A;
· แอมพลิจูดระลอกแรงดันเอาท์พุต – ไม่เกิน 150 mV;
· ความไม่เสถียรของเอาท์พุตเมื่อเปลี่ยนกระแสโหลดและอุณหภูมิแวดล้อม – 15%;
· ค่าประสิทธิภาพเฉลี่ยที่กระแสโหลดสูงสุดตลอดช่วงแรงดันเอาต์พุตทั้งหมดคือ 80%
· ความถี่ในการแปลง – 15 kHz;
· ช่วงอุณหภูมิในการทำงาน – ตั้งแต่ −25 ถึง +85 ºС
เพื่อที่จะกำจัดกระแสไฟกระชากอินพุต โดยเฉพาะอย่างยิ่งเมื่อทำงานที่ภาระหนัก โคลงจะเริ่มต้นแบบ "นุ่มนวล" เนื่องจากการแนะนำ ร 3 และ กับ 5.
ทรานซิสเตอร์ เวอร์มอนต์ 1 ควรติดตั้งบนหม้อน้ำที่มีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 140 cm2 ไดโอด วีดีนอกจากนี้ยังติดตั้งหมายเลข 2 บนหม้อน้ำที่มีพื้นที่ผิวที่มีประสิทธิภาพอย่างน้อย 10 ซม. 2
แรงดันไฟฟ้าขาเข้าของตัวปรับความเสถียรสามารถลดลงหรือเพิ่มขึ้นได้หากคำนึงถึงข้อกำหนดข้างต้นทั้งหมดสำหรับตัวปรับความเสถียรแต่ละตัว แต่ต้องคำนวณตัวแบ่งปัจจุบันอีกครั้ง ร 1, ร 2 เพื่อให้กระแสแบ่งและแรงดันแหล่งที่มาของเกตของทรานซิสเตอร์ เวอร์มอนต์ 1 ไม่เปลี่ยน.?????
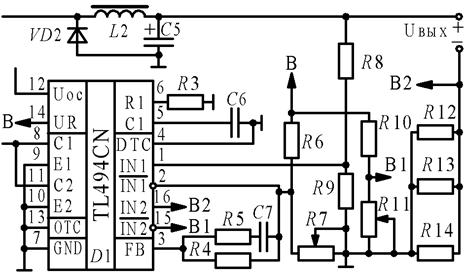
ชิปควบคุมพัลส์ KR142EP1 ช่วยให้มั่นใจได้ว่า ISN จะทำงานในโหมดเปิด-ปิดรีเลย์เป็นหลัก แต่ IC ยังให้ความสามารถในการสร้างตัวปรับแรงดันไฟฟ้าด้วยการมอดูเลตความกว้างพัลส์อีกด้วย
ตัวอย่างเช่นหากด้วยเหตุผลใดก็ตามจำเป็นต้องซิงโครไนซ์การทำงานของอุปกรณ์เกณฑ์กับความถี่ของอุปกรณ์ภายนอกบางตัวสัญญาณการซิงโครไนซ์จะถูกส่งไปยังพิน 14 และ 15 IS บ่อยครั้งที่เครื่องกำเนิดพัลส์สี่เหลี่ยม - ออสซิลเลเตอร์หลัก - ถูกใช้เป็นอุปกรณ์ดังกล่าว แรงดันไฟฟ้ากระแสสลับรูปสี่เหลี่ยมผืนผ้าของเครื่องกำเนิดไฟฟ้าดังกล่าวโดยใช้ดิฟเฟอเรนติเอต อาร์.ซี.โซ่ถูกแปลงเป็นแรงดันฟันเลื่อย ยูดื่ม ในกรณีนี้จะใช้ตัวต้านทาน ร 10 ไมโครวงจร และใช้ตัวเก็บประจุภายนอกที่มีความจุขนาดเล็ก
ไดโอดถูกใช้เป็นโหนดอินพุตสำหรับสัญญาณนี้ วีดี 3...วีดี 6 เชื่อมต่อระหว่างดิฟเฟอเรนเชียลแอมพลิฟายเออร์และทริกเกอร์ Schmitt ดังนั้นบนตัวต้านทาน ร 10 มีการเปรียบเทียบแรงดันไฟฟ้าสองค่า - แรงดันไฟฟ้าแรกเป็นสัดส่วนกับการเปลี่ยนแปลงแรงดันไฟฟ้าทั่วโหลด (เช่นใน ISN กับ RE) และจะถูกลบออกจากตัวสะสม เวอร์มอนต์ 11 เครื่องขยายสัญญาณดิฟเฟอเรนเชียล DC ยู pt และค่าที่สองคือแรงดันฟันเลื่อย ยูดื่ม จากการเปรียบเทียบแรงดันไฟฟ้าเหล่านี้ สัญญาณข้อผิดพลาดจะถูกแยกออก ซึ่งจ่ายให้กับขั้นตอนการกลับหัว เวอร์มอนต์ 7.
แรงดันไฟฟ้าของฟันเลื่อยต้องมีวงสวิงเพียงพอที่จะถ่ายโอนได้ เวอร์มอนต์ 7 สู่สถานะอิ่มตัว ส่วนหลังเมื่อเปิดจะทำงานในโหมดใกล้กับความอิ่มตัว ความล่าช้าของช่วงเวลาในขณะนั้น เวอร์มอนต์ 7 ออกมาจากความอิ่มตัวสัมพันธ์กับขอบนำของแรงดันฟันเลื่อยขึ้นอยู่กับว่าทรานซิสเตอร์เปิดแค่ไหน เวอร์มอนต์ 7,เวอร์มอนต์ 8. หากทรานซิสเตอร์เกือบปิด และแรงดันไฟฟ้าเฉลี่ยระหว่างฐานและตัวปล่อย กำหนดโดยศักย์ไฟฟ้าสะสม เวอร์มอนต์ 8 มีขนาดเล็ก จากนั้นจะเท่ากับแรงดันไฟฟ้าลดลงเชิงเส้นที่เอาต์พุตวงจรเรียงกระแสเมื่อสิ้นสุดรอบเท่านั้น
เมื่อศักยภาพของนักสะสมเพิ่มขึ้น เวอร์มอนต์ 11 (เช่น เมื่อแรงดันไฟฟ้าตกคร่อมโหลดเพิ่มขึ้น) แรงดันไฟฟ้าก็จะเพิ่มขึ้นเช่นกัน ยูอัพที แรงดันไฟฟ้านี้สอดคล้องกับการหยุดชั่วคราวขนาดใหญ่ระหว่างพัลส์แรงดันไฟฟ้า (ระยะเวลาที่สั้นกว่าของพัลส์แรงดันไฟฟ้า) ที่ถูกลบออกจากโหลดตัวปล่อยทั่วไปของทรานซิสเตอร์ เวอร์มอนต์ 7,เวอร์มอนต์ 8 - ร 9(ยูบี เวอร์มอนต์ 6) ไมโครวงจร
ทรานซิสเตอร์ เวอร์มอนต์ 6, วีที 5, วีที 4 คือแอมพลิฟายเออร์ของพัลส์ที่นำมาจากตัวต้านทาน ร 9. พัลส์ขยายจากตัวสะสม เวอร์มอนต์ 4 ผ่านตัวแบ่งแรงดันไฟฟ้าภายนอก ( ร 6, ร 3) ป้อนเข้าฐาน เวอร์มอนต์ 3 ซึ่งเป็นหนึ่งในทรานซิสเตอร์ของสวิตช์ที่รวมอยู่ในไอซี คีย์นี้ ( เวอร์มอนต์ 2, วีที 3) ควบคุม ISN ในวงจรนี้ด้วยสวิตช์ไฟภายนอกซึ่งทำในรูปแบบของทรานซิสเตอร์คอมโพสิต ( เวอร์มอนต์ 2, วีที 3). ดังนั้นเมื่อเพิ่มแรงดันไฟฟ้าที่อินพุตของ ISN จะเป็นแรงดันไฟฟ้า ยูน= (ตและ /ที)ยู n บนโหลดจะยังคงไม่เปลี่ยนแปลงเนื่องจากเวลาสถานะเปิดของทรานซิสเตอร์ควบคุมของส่วนกำลังลดลง
ปาฏิหาริย์แห่งอัลไต ผู้คนต่างพากันหลงใหลในรีสอร์ทต่างประเทศจนลืมไปว่าประเทศของเรามีขนาดใหญ่กว่าทั้งยุโรปมาก ตัวอย่างเช่นอาณาเขตของเทือกเขาอัลไตซึ่งมีพื้นที่ 9.2,000 ตารางกิโลเมตรสามารถรองรับบริเตนใหญ่ได้สิบแห่ง และมีเพียง 200,000 คนที่อาศัยอยู่ในอาณาเขตของตน ปรากฎว่านี่คือสถานที่ที่ดีที่สุดสำหรับความลับและปริศนา และหากคุณต้องการสัมผัสประวัติศาสตร์โบราณและทำความคุ้นเคยกับความลับที่แท้จริง ที่นี่คือที่สำหรับคุณ หุบเขาแห่งความตาย ประวัติศาสตร์และพื้นที่ว่างจำนวนมากทำให้สามารถอนุรักษ์อนุสรณ์สถานอันน่าทึ่งได้ ตัวอย่างเช่นในภูมิภาคเคมัลมี "หุบเขาแห่งความตาย" ทั้งหมด ริมฝั่งแม่น้ำ Katun และแม่น้ำสาขามีเนินไซเธียนหลายพันเนินกระจายอยู่ทั่วไป ซึ่งส่วนใหญ่ยังไม่ได้ถูกขุดขึ้นมา มันเป็นภาพที่น่าตื่นตาตื่นใจ แต่ความทันสมัยเข้ามารบกวนแม้ในสถานที่ที่ดูเหมือนจะขัดขืนไม่ได้ ในอนาคตอันใกล้นี้ มีการวางแผนที่จะกลับมาก่อสร้าง Katunskaya HPP อีกครั้ง อ่างเก็บน้ำที่เกิดขึ้นนั้นขู่ว่าจะท่วมเนินดินจำนวนมาก ดังนั้นขณะนี้นักโบราณคดีชาวรัสเซียและอัลไตจึงพยายามเร่งการทำงานให้เร็วขึ้น หลุมศพที่มีสีมากเกินไปทำให้เกิดการเดามากมายว่าเหตุใดจึงมีหลุมศพมากมายในอัลไต ตามที่กล่าวไว้ ดินแดนนี้เป็นบ้านบรรพบุรุษของมนุษยชาติทั้งหมด นักวิทยาศาสตร์ที่เจียมเนื้อเจียมตัวจำนวนมากเห็นพ้องกันว่าอัลไตเป็นบ้านบรรพบุรุษของเผ่าพันธุ์อินโด-ยูโรเปียน มีเวอร์ชันหนึ่งที่เป็นศูนย์กลางของอาณาจักรไซเธียนอันทรงพลังซึ่งมีพรมแดนถึงแม่น้ำดานูบ โบราณวัตถุจำนวนมากของ "สไตล์สัตว์" ที่มีชื่อเสียงของไซเธียนซึ่งมีอายุย้อนกลับไปถึงศตวรรษที่ 13 พบได้ที่นี่จริงๆ – คริสต์ศตวรรษที่ 3 พวกเขากล่าวว่าดินแดนศักดิ์สิทธิ์แห่งอัลไตไม่ได้ปล่อยบุตรชายของตนไปอย่างน่าอัศจรรย์ และพวกเขาภายใต้มนต์สะกดได้นำคนตาย (ที่ใดก็ตามที่ความตายครอบงำพวกเขา) ที่นี่ ไปยังบ้านเกิดทางประวัติศาสตร์ของพวกเขา ชูดี. มีคนภูเขาผี ชูดี. พวกเขาอาศัยอยู่เมื่อนานมาแล้วและมาจากทุ่งหญ้าสเตปป์เอมอนด์ พวกเขาเป็นเจ้านายของอัลไต การหายตัวไปของพวกเขาเกี่ยวข้องกับสีขาว ทฤษฎีหนึ่งผูกมัดต้นเบิร์ชสีขาวไว้ ทฤษฎีของ Roerich กล่าวว่าการหายตัวไปของคนกลุ่มนี้มีความเกี่ยวข้องกับการปรากฏตัวของคนผิวขาว ปาฏิหาริย์ปฏิเสธที่จะเชื่อฟัง อย่างไรก็ตาม Chuds หายตัวไปและหายไปในวิธีที่น่าสนใจมาก - พวกเขาขุดตัวเอง: Chuds ขุดหลุมขนาดใหญ่สร้างพื้นดินที่มีเสาไม้ค้ำไว้เข้าไปที่นั่นพร้อมกับทั้งเผ่าและพัง "หลังคา" ลงบนตัวพวกเขาเอง . ณ สถานที่ฝังศพตนเองเหล่านี้ หลุมทรงกรวยจะก่อตัวขึ้นเมื่อเวลาผ่านไป ซึ่งบางครั้งผู้คนก็ตกลงไป มีสมมติฐานว่าด้วยวิธีนี้ Chuds พยายามย้ายไปยังอีกโลกคู่ขนาน และพวกเขาก็ทำสำเร็จ มีคน (นักปีนเขา นักปีนเขา) ที่อ้างว่าเห็นสิ่งมีชีวิตบางอย่างคล้ายกับคนที่ออกมาจากโขดหินแล้วกลับเข้าไป แม้ว่าการมองเห็นเหล่านี้อาจเป็นผลมาจากการเจ็บป่วยจากที่สูง



