ไฟ LED ถูกนำมาใช้ในเทคโนโลยีเกือบทั้งหมดรอบตัวเรา จริงอยู่ที่บางครั้งจำเป็นต้องปรับความสว่าง (เช่น ในไฟฉายหรือจอภาพ) วิธีที่ง่ายที่สุดในสถานการณ์เช่นนี้คือการเปลี่ยนปริมาณกระแสที่ไหลผ่าน LED แต่นั่นไม่เป็นความจริง LED เป็นส่วนประกอบที่ค่อนข้างอ่อนไหว การเปลี่ยนแปลงปริมาณกระแสไฟอย่างต่อเนื่องอาจทำให้อายุการใช้งานสั้นลงหรือทำให้กระแสไฟเสียหายได้อย่างมาก นอกจากนี้ยังจำเป็นต้องคำนึงด้วยว่าคุณไม่สามารถใช้ตัวต้านทานแบบจำกัดได้เนื่องจากพลังงานส่วนเกินจะสะสมอยู่ในนั้น ซึ่งเป็นที่ยอมรับไม่ได้เมื่อใช้แบตเตอรี่ ปัญหาอีกประการหนึ่งของวิธีนี้คือสีของแสงจะเปลี่ยนไป
มีสองตัวเลือก:
- การควบคุม PWM
- อนาล็อก
วิธีการเหล่านี้ควบคุมกระแสที่ไหลผ่าน LED แต่มีความแตกต่างบางประการระหว่างกัน
การควบคุมแบบอะนาล็อกจะเปลี่ยนระดับกระแสที่ไหลผ่าน LED และ PWM จะควบคุมความถี่ของการจ่ายกระแสไฟฟ้า
การควบคุม PWM
ทางออกจากสถานการณ์นี้อาจเป็นการใช้การมอดูเลตความกว้างพัลส์ (PWM) ด้วยระบบนี้ LED จะได้รับกระแสไฟฟ้าที่จำเป็นและความสว่างจะถูกปรับโดยการจ่ายพลังงานจาก ความถี่สูง- นั่นคือความถี่ของระยะเวลาการป้อนจะเปลี่ยนความสว่างของ LED
ข้อได้เปรียบที่ไม่อาจปฏิเสธได้ของระบบ PWM คือการรักษาประสิทธิภาพของ LED ประสิทธิภาพจะอยู่ที่ประมาณ 90%
ประเภทของการควบคุม PWM
- สองสาย. มักใช้ในระบบไฟส่องสว่างรถยนต์ แหล่งจ่ายไฟของคอนเวอร์เตอร์ต้องมีวงจรที่สร้างสัญญาณ PWM ที่เอาต์พุต DC
- อุปกรณ์แบ่ง หากต้องการกำหนดระยะเวลาเปิด/ปิดของตัวแปลง ให้ใช้ส่วนประกอบสับเปลี่ยนที่ให้เส้นทางสำหรับกระแสเอาต์พุตอื่นที่ไม่ใช่ LED
พารามิเตอร์พัลส์สำหรับ PWM
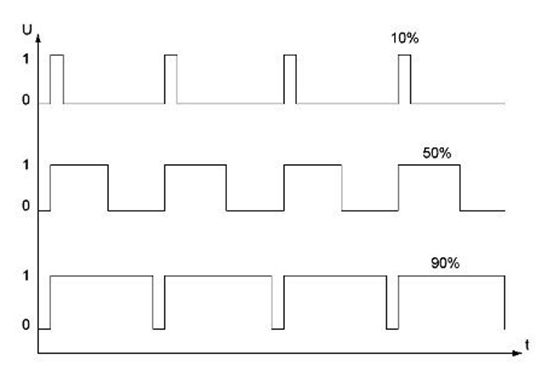
อัตราการเกิดซ้ำของพัลส์ไม่เปลี่ยนแปลง ดังนั้นจึงไม่มีข้อกำหนดในการกำหนดความสว่างของแสง ในกรณีนี้ เฉพาะความกว้างหรือเวลาของพัลส์บวกเท่านั้นที่เปลี่ยนแปลง
ความถี่พัลส์
แม้จะคำนึงถึงความจริงที่ว่าไม่มีการร้องเรียนเป็นพิเศษเกี่ยวกับความถี่ แต่ก็ยังมีค่าจำกัดอยู่ ถูกกำหนดโดยความไวของสายตามนุษย์ต่อการกะพริบ ตัวอย่างเช่น ในภาพยนตร์ เฟรมจะต้องกะพริบที่ 24 เฟรมต่อวินาทีเพื่อให้ดวงตาของเรารับรู้ว่าเป็นภาพเคลื่อนไหวหนึ่งภาพ
เพื่อให้แสงริบหรี่ถูกมองว่าเป็นแสงสม่ำเสมอ ความถี่ต้องมีอย่างน้อย 200 เฮิรตซ์ ไม่มีข้อจำกัดสำหรับตัวบ่งชี้ด้านบน แต่ก็ไม่มีทางที่ต่ำกว่านี้ได้
ตัวควบคุม PWM ทำงานอย่างไร
สเตจคีย์ทรานซิสเตอร์ใช้เพื่อควบคุม LED โดยตรง โดยทั่วไปแล้วจะใช้ทรานซิสเตอร์ที่สามารถสะสมพลังงานได้จำนวนมาก
นี่เป็นสิ่งจำเป็นเมื่อใช้ แถบ LEDหรือไฟ LED กำลังสูง
สำหรับปริมาณน้อยหรือพลังงานต่ำ การใช้ทรานซิสเตอร์แบบไบโพลาร์ก็เพียงพอแล้ว คุณยังสามารถเชื่อมต่อ LED เข้ากับไมโครวงจรได้โดยตรง
เครื่องกำเนิดไฟฟ้าแบบพีเอ็มดับเบิลยู
ในระบบ PWM ไมโครคอนโทรลเลอร์หรือวงจรที่ประกอบด้วยวงจรรวมต่ำสามารถใช้เป็นมาสเตอร์ออสซิลเลเตอร์ได้
นอกจากนี้ยังสามารถสร้างตัวควบคุมจากวงจรขนาดเล็กที่ออกแบบมาสำหรับสวิตชิ่งจ่ายไฟหรือชิปลอจิก K561 หรือตัวจับเวลาในตัว NE565
ช่างฝีมือยังใช้แอมพลิฟายเออร์ปฏิบัติการเพื่อจุดประสงค์เหล่านี้ด้วย ในการทำเช่นนี้จะมีการประกอบเครื่องกำเนิดไฟฟ้าซึ่งสามารถปรับเปลี่ยนได้
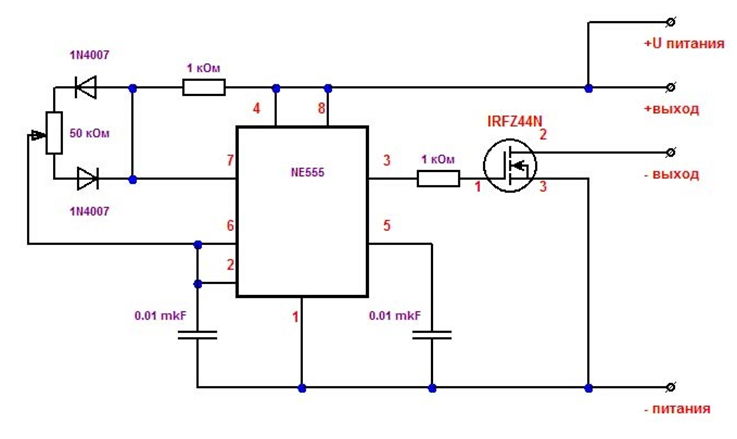
หนึ่งในวงจรที่ใช้มากที่สุดคือวงจรตัวจับเวลา 555 โดยพื้นฐานแล้วมันคือออสซิลเลเตอร์ทั่วไป พัลส์สี่เหลี่ยม- ความถี่ถูกควบคุมโดยตัวเก็บประจุ C1 ที่เอาต์พุตที่ตัวเก็บประจุควรมี ไฟฟ้าแรงสูง(สิ่งนี้เหมือนกันกับการเชื่อมต่อกับแหล่งจ่ายไฟบวก) และจะชาร์จเมื่อมีแรงดันไฟฟ้าต่ำที่เอาต์พุต ช่วงเวลานี้ทำให้เกิดพัลส์ที่มีความกว้างต่างกัน
วงจรยอดนิยมอีกวงจรหนึ่งคือ PWM ที่ใช้ชิป UC3843 ในกรณีนี้วงจรสวิตชิ่งถูกเปลี่ยนไปสู่การทำให้ง่ายขึ้น เพื่อควบคุมความกว้างของพัลส์ จะใช้แรงดันไฟฟ้าควบคุมขั้วบวก ในกรณีนี้ผลลัพธ์จะเป็นที่ต้องการ สัญญาณชีพจรพีเอ็มดับเบิลยู
แรงดันไฟฟ้าควบคุมจะทำหน้าที่กับเอาต์พุตดังนี้: เมื่อลดลง ความกว้างจะเพิ่มขึ้น
ทำไมต้องพีเอ็มดับเบิลยู?
- ข้อได้เปรียบหลักของระบบนี้คือความง่าย รูปแบบการใช้งานนั้นเรียบง่ายและใช้งานง่าย
- ระบบควบคุมแบบ PWM ให้ผลดีมาก หลากหลายการปรับความสว่าง หากเราพูดถึงจอภาพ คุณสามารถใช้ไฟแบ็คไลท์ CCFL ได้ แต่ในกรณีนี้ความสว่างจะลดลงเพียงครึ่งเดียวเท่านั้น เนื่องจากไฟแบ็คไลท์ CCFL ต้องการปริมาณกระแสและแรงดันไฟฟ้าอย่างมาก
- การใช้ PWM คุณสามารถรักษาระดับกระแสให้คงที่ได้ ซึ่งหมายความว่า LED จะไม่เสียหายและ อุณหภูมิที่มีสีสันจะไม่เปลี่ยนแปลง
ข้อเสียของการใช้ PWM
- เมื่อเวลาผ่านไป ภาพจะกะพริบอย่างเห็นได้ชัด โดยเฉพาะที่ความสว่างต่ำหรือการเคลื่อนไหวของดวงตา
- ภายใต้แสงสว่างจ้าตลอดเวลา (เช่น แสงแดด) ภาพอาจเบลอ
PWM หรือ PWM (การปรับความกว้างพัลส์ในภาษาอังกฤษ) เป็นวิธีหนึ่งในการควบคุมการจ่ายพลังงานให้กับโหลด การควบคุมประกอบด้วยการเปลี่ยนระยะเวลาพัลส์ที่อัตราการเกิดซ้ำของพัลส์คงที่ การมอดูเลตความกว้างพัลส์สามารถเป็นแอนะล็อก, ดิจิตอล, ไบนารี่และไตรภาคได้
การใช้การปรับความกว้างพัลส์ทำให้สามารถเพิ่มประสิทธิภาพของตัวแปลงไฟฟ้าได้ โดยเฉพาะอย่างยิ่งสำหรับตัวแปลงพัลส์ ซึ่งปัจจุบันเป็นพื้นฐานของแหล่งจ่ายไฟรองสำหรับอุปกรณ์อิเล็กทรอนิกส์ต่างๆ ฟลายแบ็คและจังหวะเดินหน้า จังหวะเดียว พุชพูล และฮาล์ฟบริดจ์ รวมถึงบริดจ์ ตัวแปลงพัลส์ได้รับการควบคุมในปัจจุบันด้วยการมีส่วนร่วมของ PWM ซึ่งใช้กับตัวแปลงเรโซแนนซ์ด้วย
การปรับความกว้างพัลส์ช่วยให้คุณปรับความสว่างของแสงพื้นหลังของจอแสดงผลคริสตัลเหลว โทรศัพท์มือถือ,สมาร์ทโฟน,แล็ปท็อป PWM ถูกนำมาใช้ในอินเวอร์เตอร์รถยนต์เครื่องชาร์จ ฯลฯ ใดก็ได้ ที่ชาร์จวันนี้เขาใช้ PWM ในการทำงานของเขา
เป็นองค์ประกอบการสลับในตัวแปลงความถี่สูงสมัยใหม่ ไบโพลาร์ และ ทรานซิสเตอร์สนามผล, ทำงานใน โหมดคีย์- ซึ่งหมายความว่าส่วนหนึ่งของคาบที่ทรานซิสเตอร์เปิดสนิท และส่วนหนึ่งของคาบปิดสนิท
และเนื่องจากในสถานะชั่วคราวที่กินเวลาเพียงสิบนาโนวินาที พลังงานที่ปล่อยออกมาบนสวิตช์จึงมีน้อยเมื่อเทียบกับพลังงานที่มีสวิตช์ ดังนั้นพลังงานเฉลี่ยที่ปล่อยออกมาในรูปของความร้อนบนสวิตช์จึงกลายเป็นไม่มีนัยสำคัญในท้ายที่สุด ในกรณีนี้ในสถานะปิดความต้านทานของทรานซิสเตอร์ในฐานะสวิตช์มีขนาดเล็กมากและแรงดันไฟฟ้าตกคร่อมจะเข้าใกล้ศูนย์
ในสถานะเปิด ค่าการนำไฟฟ้าของทรานซิสเตอร์ใกล้กับศูนย์และในทางปฏิบัติแล้วไม่มีกระแสไหลผ่าน สิ่งนี้ช่วยให้คุณสร้างตัวแปลงขนาดกะทัดรัดด้วย ประสิทธิภาพสูงนั่นคือมีการสูญเสียความร้อนเล็กน้อย และตัวแปลงเรโซแนนซ์ที่มีการสลับที่ ZCS กระแสเป็นศูนย์ (การสลับกระแสเป็นศูนย์) ทำให้สามารถลดการสูญเสียเหล่านี้ให้เหลือน้อยที่สุด
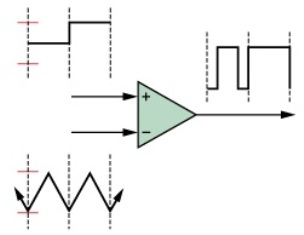
ในเครื่องกำเนิดไฟฟ้า PWM ชนิดแอนะล็อก สัญญาณควบคุมถูกสร้างขึ้นโดยตัวเปรียบเทียบแอนะล็อก ตัวอย่างเช่น เมื่อสัญญาณรูปสามเหลี่ยมหรือฟันเลื่อยถูกส่งไปยังอินพุทแบบกลับตัวของตัวเปรียบเทียบ และสัญญาณต่อเนื่องแบบมอดูเลตถูกจ่ายให้กับอินพุทที่ไม่กลับด้าน
พัลส์เอาท์พุตเป็นรูปสี่เหลี่ยมผืนผ้า ความถี่การทำซ้ำจะเท่ากับความถี่ของเลื่อย (หรือสัญญาณรูปสามเหลี่ยม) และระยะเวลาของส่วนที่เป็นบวกของพัลส์สัมพันธ์กับเวลาที่ระดับของสัญญาณคงที่มอดูเลตที่จ่ายให้กับ อินพุทที่ไม่กลับด้านของตัวเปรียบเทียบจะสูงกว่าระดับของสัญญาณเลื่อย ซึ่งจ่ายให้กับอินพุทกลับด้าน เมื่อแรงดันเลื่อยสูงกว่าสัญญาณมอดูเลต เอาต์พุตจะมีส่วนลบของพัลส์
ถ้าเลื่อยถูกป้อนไปที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ และสัญญาณมอดูเลตถูกป้อนไปที่อินพุตที่กลับด้าน จากนั้นพัลส์เอาต์พุตจะ รูปร่างสี่เหลี่ยมจะมี ค่าบวกเมื่อแรงดันไฟฟ้าของเลื่อยสูงกว่าค่าของสัญญาณมอดูเลตที่จ่ายให้กับอินพุทแบบกลับด้าน และค่าลบ - เมื่อแรงดันไฟฟ้าของเลื่อยต่ำกว่าสัญญาณมอดูเลต ตัวอย่างของการสร้าง PWM แบบอะนาล็อกคือไมโครวงจร TL494 ซึ่งใช้กันอย่างแพร่หลายในปัจจุบันในการสร้างแหล่งจ่ายไฟแบบสวิตชิ่ง
Digital PWM ใช้ในเทคโนโลยีดิจิทัลไบนารี พัลส์เอาท์พุตยังรับเพียงหนึ่งค่าจากสองค่า (เปิดหรือปิด) และระดับเอาท์พุตเฉลี่ยจะเข้าใกล้ระดับที่ต้องการ ในที่นี้รับสัญญาณฟันเลื่อยได้โดยใช้ตัวนับ N-bit
อุปกรณ์ดิจิตอลที่มี PWM ยังทำงานที่ความถี่คงที่ซึ่งเกินเวลาตอบสนองของอุปกรณ์ควบคุมอย่างมาก วิธีการนี้เรียกว่าการสุ่มตัวอย่างเกิน ระหว่างขอบนาฬิกา เอาต์พุต PWM แบบดิจิทัลยังคงมีเสถียรภาพ ไม่ว่าจะสูงหรือต่ำ ขึ้นอยู่กับสถานะปัจจุบันของเอาต์พุตของตัวเปรียบเทียบดิจิทัล ซึ่งจะเปรียบเทียบระดับสัญญาณที่ตัวนับและสัญญาณดิจิทัลโดยประมาณ
เอาต์พุตจะถูกโอเวอร์คล็อกตามลำดับของพัลส์ที่มีสถานะ 1 และ 0 แต่ละสถานะนาฬิกาอาจเปลี่ยนแปลงไปในทางตรงกันข้ามหรือไม่ก็ได้ ความถี่ของพัลส์เป็นสัดส่วนกับระดับของสัญญาณที่เข้ามาใกล้ และหน่วยที่อยู่ถัดจากกันสามารถสร้างพัลส์ที่กว้างและยาวขึ้นได้
พัลส์ผลลัพธ์ที่มีความกว้างแปรผันจะเป็นผลคูณของคาบสัญญาณนาฬิกา และความถี่จะเท่ากับ 1/2NT โดยที่ T คือคาบนาฬิกา N คือจำนวนรอบสัญญาณนาฬิกา สามารถทำได้มากขึ้นที่นี่ ความถี่ต่ำสัมพันธ์กับความถี่สัญญาณนาฬิกา วงจรการสร้างดิจิทัลที่อธิบายไว้คือ PWM หนึ่งบิตหรือสองระดับ การมอดูเลต PCM แบบเข้ารหัสพัลส์
การมอดูเลตที่ใช้รหัสพัลส์สองระดับนี้โดยพื้นฐานแล้วคือชุดของพัลส์ที่มีความถี่ 1/T และความกว้างเป็น T หรือ 0 การสุ่มตัวอย่างเกินจะใช้เพื่อหาค่าเฉลี่ยในช่วงเวลาที่มากขึ้น คุณภาพสูง PWM สามารถทำได้โดยการมอดูเลตความหนาแน่นของพัลส์หนึ่งบิต หรือที่เรียกว่าการมอดูเลตความถี่พัลส์
ด้วยการมอดูเลตความกว้างพัลส์แบบดิจิทัล พัลส์ย่อยรูปสี่เหลี่ยมผืนผ้าที่เติมเต็มคาบสามารถตกที่ตำแหน่งใดก็ได้ในช่วงเวลานั้น และจากนั้นเฉพาะตัวเลขเท่านั้นที่ส่งผลต่อค่าเฉลี่ยของสัญญาณในช่วงเวลานั้น ดังนั้นหากคุณแบ่งช่วงเวลาออกเป็น 8 ส่วนการรวมกันของพัลส์ 11001100, 11110000, 11000101, 10101010 เป็นต้น จะให้ค่าเฉลี่ยเท่ากันสำหรับช่วงเวลาดังกล่าวอย่างไรก็ตามหน่วยที่แยกจากกันจะทำให้โหมดการทำงานของทรานซิสเตอร์หลักหนักขึ้น
ผู้ทรงคุณวุฒิด้านอิเล็กทรอนิกส์ที่พูดถึง PWM ให้การเปรียบเทียบกับกลไกดังต่อไปนี้ หากคุณใช้เครื่องยนต์เพื่อหมุนมู่เล่ที่มีน้ำหนักมาก เนื่องจากเครื่องยนต์สามารถเปิดหรือปิดได้ มู่เล่จะหมุนและหมุนต่อไป หรือจะหยุดเนื่องจากการเสียดสีเมื่อดับเครื่องยนต์
แต่ถ้าเครื่องยนต์เปิดอยู่สองสามวินาทีต่อนาที การหมุนของมู่เล่จะคงอยู่ตามความเร็วที่แน่นอนเนื่องจากความเฉื่อย และยิ่งเปิดเครื่องยนต์นานขึ้น ความเร็วมู่เล่จะหมุนก็จะยิ่งสูงขึ้นเท่านั้น เช่นเดียวกับ PWM สัญญาณเปิดและปิด (0 และ 1) มาที่เอาต์พุต และด้วยเหตุนี้ จึงได้ค่าเฉลี่ย ด้วยการรวมแรงดันพัลส์เมื่อเวลาผ่านไป เราจะได้พื้นที่ใต้พัลส์ และผลกระทบต่อร่างกายการทำงานจะเหมือนกันกับการทำงานที่ค่าแรงดันไฟฟ้าเฉลี่ย
นี่คือวิธีการทำงานของตัวแปลง โดยที่การสลับเกิดขึ้นหลายพันครั้งต่อวินาที และความถี่สูงถึงหลายเมกะเฮิรตซ์ ตัวควบคุม PWM พิเศษที่ใช้ในการควบคุมบัลลาสต์แพร่หลาย หลอดประหยัดไฟ, อุปกรณ์จ่ายไฟ ฯลฯ
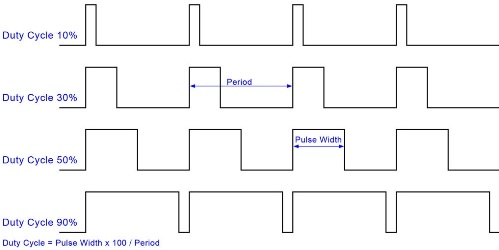
อัตราส่วนของระยะเวลารวมของช่วงพัลส์ต่อเวลาเปิดเครื่อง (ส่วนที่เป็นบวกของพัลส์) เรียกว่ารอบการทำงานของพัลส์ ดังนั้นหากเวลาเปิดเครื่องคือ 10 μs และช่วงเวลาคงอยู่ 100 μs ดังนั้นที่ความถี่ 10 kHz รอบการทำงานจะเท่ากับ 10 และเขียนว่า S = 10 เรียกว่ารอบหน้าที่ผกผัน รอบหน้าที่ของพัลส์ ในภาษาอังกฤษ Duty Cycle หรือตัวย่อ DC
ตามตัวอย่างที่กำหนด DC = 0.1 เนื่องจาก 10/100 = 0.1 ด้วยการมอดูเลตความกว้างพัลส์ โดยการปรับรอบการทำงานของพัลส์ กล่าวคือ โดยการเปลี่ยนแปลง DC เพื่อให้ได้ค่าเฉลี่ยที่ต้องการที่เอาต์พุตของอิเล็กทรอนิกส์หรืออุปกรณ์อื่นๆ อุปกรณ์ไฟฟ้าเช่น เครื่องยนต์
ไมโครวงจรดิจิตอลและการใช้งาน
วี. กอร์บาตีค, อูลาน-อูเด
วิทยุ พ.ศ. 2541 ฉบับที่ 8
ก่อนอื่นเรามาดูวงจรของเครื่องกำเนิดพัลส์สี่เหลี่ยม (รูปที่ 1) ซึ่งสร้างบนฟลิปฟล็อป RS สองตัวจากองค์ประกอบลอจิกของไมโครวงจร MOS หรือ CMOS
รองเท้าแตะจะยังคงอยู่ในสถานะนี้จนกว่าระดับบันทึกจะปรากฏที่อินพุต 1 0. เวลานี้ถูกกำหนดโดยความจุอินพุต C2 กระแสไฟรั่วอินพุต* และความแตกต่างระหว่างแรงดันบันทึก 1 (ประมาณเท่ากับ Upit) และแรงดันไฟฟ้าเกณฑ์ของวงจรไมโคร (ประมาณครึ่งหนึ่งของ Upit): t = C2-(Upup Upor) Iut.
หลังจากที่ความจุ C2 ถูกคายประจุจนถึงแรงดันไฟฟ้าเกณฑ์ ทริกเกอร์ตัวที่สองจะเปลี่ยนอีกครั้ง C2 จะถูกชาร์จอีกครั้ง และการคายประจุของ C1 จะเริ่มขึ้น เมื่อถึงเกณฑ์แรงดันไฟฟ้า ทริกเกอร์ตัวที่สองจะเปลี่ยนอีกครั้ง จากนั้นจึงทำซ้ำกระบวนการต่างๆ
ระยะเวลาของพัลส์ในเครื่องกำเนิดไฟฟ้าสามารถควบคุมได้โดยการเปลี่ยนกระแสคายประจุของความจุอินพุตขององค์ประกอบลอจิก ตามหลักการนี้ สามารถสร้างเครื่องกำเนิดไฟฟ้าที่มีการมอดูเลตความกว้างพัลส์ได้
ลองพิจารณาตัวเลือกการมอดูเลตนี้โดยละเอียด เราจะเชื่อมต่อแหล่งกระแสสองแหล่งที่ควบคุมโดยสัญญาณมอดูเลตกับอินพุต 1 และ 6 ขององค์ประกอบ DD1 (รูปที่ 2) เมื่อสัญญาณอินพุตเปลี่ยนแปลง กระแสของแหล่งหนึ่งจะเพิ่มขึ้น ∆I และกระแสของอีกแหล่งหนึ่งจะลดลง ∆I
ดังนั้น ช่วงหนึ่งจะเป็น: T = t1+ t2 = C1 X Upor/(I + ΔI) + C2 x X Upor/(I - ΔI)
ดังที่เห็นได้จากสูตร ยิ่งกระแสคายประจุของตัวเก็บประจุอินพุตมากขึ้น ระยะเวลาก็จะสั้นลง และด้วยเหตุนี้ ความถี่ของโมดูเลเตอร์ก็จะยิ่งสูงขึ้นตามไปด้วย
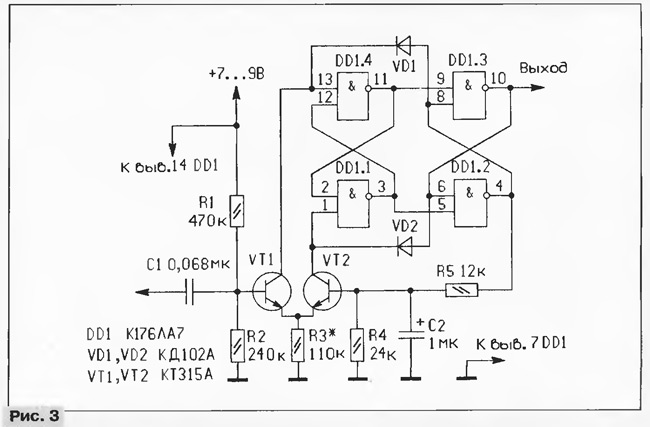
การกู้คืนสัญญาณดั้งเดิม (มอดูเลต) สามารถทำได้โดยใช้วงจรรวมอย่างง่าย ที่เอาต์พุต ซึ่งที่แอมพลิจูดพัลส์คงที่ (Uamp) แรงดันเอาต์พุตจะเป็น: Uout = Uamp x t1(t1+t2) เป็นเรื่องง่ายที่จะสรุปได้ว่าด้วยΔI = 0 ความจุอินพุตที่เหมือนกันและแรงดันไฟฟ้าเกณฑ์ของอินพุตองค์ประกอบลอจิก แรงดันไฟฟ้าที่มีค่าใกล้เคียงกับครึ่งหนึ่งของแรงดันไฟฟ้าจะทำงานที่เอาต์พุตของวงจรรวม การเปลี่ยนแปลงแรงดันเอาต์พุตและค่าสัมประสิทธิ์การส่งผ่านสำหรับสัญญาณมอดูเลตสอดคล้องกับนิพจน์: ΔUout = Uamp X ΔI/2I; K = ΔUout/ΔUin = (Uamp/2I)∙(2I/Ut) = = Uamp/Ut โดยที่แรงดันไฟฟ้าอุณหภูมิ Ut เท่ากับ 26 mV ที่อุณหภูมิ 300 K อีกหนึ่งหมายเหตุ ภายใต้อิทธิพลของสัญญาณอินพุต ทั้งระยะเวลาพัลส์และระยะเวลาหยุดชั่วคราวจะเปลี่ยนไป ความถี่พัลส์ก็เปลี่ยนแปลงเล็กน้อยเช่นกัน: เมื่อสัญญาณอินพุตเพิ่มขึ้นก็จะลดลง สิ่งนี้จะกำหนดช่วงไดนามิกที่ค่อนข้างใหญ่ของอุปกรณ์ รูปแบบการปฏิบัติเครื่องกำเนิดไฟฟ้าจะแสดงในรูป 3. องค์ประกอบต่างๆ จะถูกเลือกด้วยเหตุผลของความพร้อมใช้งานและความสามารถในการทำซ้ำของพารามิเตอร์ เปิดสเตจดิฟเฟอเรนเชียลอินพุต (VT1, VT2) แล้ว ทรานซิสเตอร์สองขั้ว KT315 (ที่มีดัชนีตัวอักษรใดๆ) โดยควรมีค่าสัมประสิทธิ์การถ่ายโอนกระแสพื้นฐานใกล้เคียงกัน ไดโอดที่ใช้คือ KD102 ที่มีค่าต่ำ กระแสย้อนกลับ- เพื่อเพิ่มเสถียรภาพของเครื่องกำเนิดไฟฟ้าให้เป็นลบ ข้อเสนอแนะจากเอาต์พุต 4 ผ่านตัวกรองความถี่ต่ำผ่านที่ประกอบด้วยตัวต้านทาน R5 ตัวเก็บประจุ C2 และตัวต้านทาน R4 ที่มีความถี่คัตออฟประมาณ 16 Hz
เครื่องกำเนิดไฟฟ้าถูกปรับโดยการเลือกตัวต้านทาน R3 ให้เป็นความถี่มอดูเลตที่ต้องการ
สัญญาณมอดูเลตความกว้างพัลส์มักใช้ในอุปกรณ์อิเล็กทรอนิกส์เพื่อส่งข้อมูล ควบคุมกำลัง หรือสร้างแรงดันไฟฟ้าคงที่ในระดับใดก็ได้ บทความนี้จะอธิบายอุปกรณ์ขยายสัญญาณปฏิบัติการขนาด 20x20 มม. ซึ่งประกอบด้วยองค์ประกอบ 15 ชิ้น ซึ่งสร้างสัญญาณ PWM
สัญญาณ PWM (PWM) คือลำดับของพัลส์ ซึ่งมีความถี่คงที่ และระยะเวลาของพัลส์จะถูกมอดูเลต ไมโครคอนโทรลเลอร์ส่วนใหญ่รับมือกับงานนี้ได้ง่าย แต่จะทำอย่างไรถ้าคุณไม่ต้องการตั้งโปรแกรมและใช้งานเช่นนั้น เครื่องมืออันทรงพลังสำหรับงานง่ายๆ แบบนี้เหรอ? ในกรณีนี้ สามารถใช้องค์ประกอบแบบแยกส่วนได้
ขั้นแรก คุณต้องสร้างลำดับของพัลส์ฟันเลื่อยและนำไปใช้กับอินพุตของตัวเปรียบเทียบ สัญญาณมอดูเลต เช่น แรงดันไฟฟ้าจากตัวต้านทานแบบแปรผัน จะถูกจ่ายให้กับอินพุตที่สองของตัวเปรียบเทียบ หากแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าสูงกว่าแรงดันไฟฟ้าที่อินพุตที่สอง แรงดันไฟฟ้าเอาต์พุตจะใกล้เคียงกับแรงดันไฟฟ้าของแหล่งจ่ายไฟ หากแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าต่ำกว่า เอาต์พุตจะเป็นศูนย์
ในรูป Uk คือแรงดันไฟฟ้าคำสั่ง (ระดับคงที่ที่กำหนดโดยตัวต้านทานผันแปร) Ugen คือแรงดันไฟของเครื่องกำเนิดไฟฟ้า UPWM คือสัญญาณ PWM
โครงการ
งานทั้งหมดนี้สามารถบรรลุผลได้อย่างง่ายดายโดยใช้แอมพลิฟายเออร์ปฏิบัติการสองตัวดังที่แสดงในแผนภาพ
วงจรนี้ใช้ชิป LM358N ซึ่งใช้พลังงานจากแหล่งเดียวและประกอบด้วยสองช่องสัญญาณในแพ็คเกจ SO8 เดียว
แผงวงจรพิมพ์
องค์ประกอบทั้งหมดยกเว้นตัวต้านทาน R3 ได้รับการออกแบบสำหรับการติดตั้งบนพื้นผิวและตั้งอยู่บนบอร์ดด้วย ขนาดขั้นต่ำ- R3 ตั้งอยู่บน ด้านหลังค่าธรรมเนียม วงจรออสซิลเลเตอร์นั้นไม่แน่นอนมากจากมุมมองของการติดตามแผงวงจรพิมพ์ หากคุณเปลี่ยนโทโพโลยีของบอร์ด จะไม่สามารถรับประกันการทำงานของบอร์ดได้ บอร์ดเวอร์ชันแรกสร้างแรงดันไฟฟ้าแบบฟันเลื่อยที่มีแอมพลิจูดต่ำมากและใช้งานไม่ได้
รายการองค์ประกอบ
- IC LM358N ในแพ็คเกจ SO8 (DA1), 1 ชิ้น
- ตัวต้านทาน 20 kOhm ในตัวเรือน 0805 (R1, R2, R4-R6), 5 ชิ้น
- ตัวต้านทาน 10 kOhm ในตัวเรือน 0805 (R7, R8), 2 ชิ้น
- ใดๆ ตัวต้านทานแบบแปรผันด้วยระยะพิทช์ตะกั่ว 5 มม. และความต้านทาน 50 kOhm
- ตัวเก็บประจุ 0.1 µF ในตัวเครื่อง 0805 (C1, C2, C4), 3 ชิ้น
- ตัวเก็บประจุแทนทาลัม 47uF, 16V, ไซส์ C, T491C476K016AT (C3), 1 ชิ้น
วีดีโอการทำงาน
บอร์ดทำงานค่อนข้างเสถียร วิดีโอแสดงให้เห็นว่าความสว่างของ LED เปลี่ยนแปลงไปอย่างไร ความไม่สะดวกเพียงอย่างเดียวคือใช้ตัวต้านทาน R3 เพียงครึ่งหนึ่งของช่วงเท่านั้น นั่นคือในไตรมาสแรกและสุดท้ายของตำแหน่งเพลา แรงดันไฟฟ้ายังคงไม่เปลี่ยนแปลง
ไฟล์ แผงวงจรพิมพ์ในรูปแบบ Sprint Layout 5.0 สามารถดาวน์โหลดได้จากลิงค์
เรายินดีเป็นอย่างยิ่งหากคุณสนับสนุนทรัพยากรของเราและเยี่ยมชมร้านค้าผลิตภัณฑ์ของเรา
ปัญหาง่ายๆ เกิดขึ้นในขณะนี้ เราต้องการ PWM ที่ปรับได้ด้วยตนเองเพื่อทดสอบแนวคิดหนึ่งข้อ Teena 13 ใกล้เข้ามาแล้ว - เช่น เราเชื่อมต่อตัวแปรกับ ADC และส่งออกสิ่งที่เราต้องการ ดูเหมือนว่าการกระพริบไฟ LED จะง่ายกว่า อย่างไรก็ตาม. มันเริ่มมืดแล้ว
ทุกอย่างเสียบเข้ากับ breadboard อย่างรวดเร็ว และด้วยความช่วยเหลือจากวิซาร์ดใน CodeVision โปรเจ็กต์จึงประกอบได้ด้วยการคลิกเพียงไม่กี่ครั้ง สำหรับการทดสอบเอาต์พุต - LED ฉันเปิดมัน: ไฟสว่างเต็มที่ ฉันหมุนตัวต้านทาน - ไม่มีปฏิกิริยาใด ๆ ฉันตรวจสอบการเชื่อมต่อ, แหล่งจ่ายไฟ, วงจร, เฟิร์มแวร์ทั้งหมดอย่างรวดเร็ว - ผลยังคงอยู่ หลังจากทำซ้ำการกระทำเดิมสามครั้ง ความสับสนก็เกิดขึ้น ฉันใช้ดีบุกอีกอัน แฟลชมัน เปิดมัน - โบลต์ ดูเหมือนว่าปัญหาไม่ได้อยู่ที่ชิป ฉันใคร่ครวญโค้ดที่สร้างโดย CodeVision มาระยะหนึ่งแล้ว - ไม่มีอะไรจะบ่น ฉันเปิดเอกสารข้อมูลและเจาะลึก ฉันศึกษา ADC ตรวจสอบแล้ว - ทุกอย่างเป็นไปตามหลักการ เปลี่ยนเป็น PWM แล้ว
คำอธิบายสั้น ๆ เกี่ยวกับฮาร์ดแวร์ PWM บน Attiny13 สำหรับผู้เริ่มต้น:
PWM ขึ้นอยู่กับตัวจับเวลา เหล่านั้น. ตัวจับเวลามีโหมดการทำงานหลายโหมด สองโหมด ได้แก่ PWM (FastPWM และ Phase Correct PWM) ตัวจับเวลาได้รับการกำหนดค่าโดยใช้รีจิสเตอร์สองตัว: TCCR0A, TCCR0B พวกเขาตั้งค่าโหมดความถี่ (ตัวแบ่ง) ซึ่งใช้ช่องสัญญาณ (มีสอง - 0A และ 0B) โหมดการทำงานของเอาต์พุต (โดยตรง, กลับด้าน) ค่า PWM ถูกตั้งค่าไว้ในรีจิสเตอร์ OCR0A และ OCR0B - ตามลำดับสำหรับแต่ละช่องสัญญาณ นอกจากนี้ PWM ยังมีการตั้งค่าดังกล่าว - สิ่งที่กำหนดค่าสูงสุดของตัวจับเวลา (TOP) เมื่อไปถึงค่าที่รีเซ็ตและรันตั้งแต่ต้น - ซึ่งอาจเป็น 0xFF หรือค่าในการลงทะเบียน OCR0A ฉันติดตั้งโหมดที่สองแล้วและตั้งค่า PWM ในรีจิสเตอร์ OCR0A
ฉันใช้เวลานานมากกว่าจะพบข้อผิดพลาดและใช้เวลานานกว่านั้นกว่าจะเข้าใจความหมายของมันได้ แม้ว่าตอนนี้ทุกอย่างจะดูชัดเจนแล้วก็ตาม สำหรับผู้ที่อยู่ในรถถังเช่นฉัน TOP ควรเป็น 0xFF ควรสังเกตว่าโหมดการตั้งค่าผ่านรีจิสเตอร์ไม่มีอินเทอร์เฟซที่ใช้งานง่าย ดังนั้นโหมดข้างต้นจะถูกกำหนดโดยบิต WGM02:0 ซึ่งสองบิตอยู่ในรีจิสเตอร์ TCCR0A (00,01) และบิตที่สาม (02) ใน TCCR0B จริงอยู่ ตัวช่วย CodeVision คือทุกสิ่งทุกอย่างของเราในระหว่างการตั้งค่าเริ่มต้น แต่เมื่อคุณต้องการแก้ไขบางสิ่งที่อยู่ในกระบวนการ คุณจะต้องเครียดเอง
ในระยะสั้นคราดต่อไป ความสว่างสามารถปรับได้ แต่นี่คือปัญหา: เมื่อฉันหมุนปุ่มไปที่ค่าต่ำสุด มันยังคงสว่างอยู่ เหล่านั้น. เรามี 0 บน ADC แต่ไม่ใช่ 0 ในเอาต์พุต น่าเสียดายนะ สาเหตุของพฤติกรรมนี้คือในขณะที่รีเซ็ตตัวจับเวลาเป็น 0 ชิปจะตั้งค่าเอาต์พุตเป็น 1 และแม้ว่าค่า PWM จะถูกตั้งค่าเป็น 0 และในรอบนาฬิกาถัดไปก็เห็นสิ่งนี้และรีเซ็ตเอาต์พุต แต่การกระโดดที่โชคร้ายนี้ก็เพียงพอแล้วที่ LED จะส่องสว่าง ความรู้สึกไม่สบาย - คุณคาดว่าเอาต์พุตจะเป็น 0 สะอาด แต่ที่นี่คุณมีหวีนี้ โดยทั่วไปแล้วปัญหาก็ทราบแล้ว วิธีแก้ปัญหาเกิดขึ้นในใจเกือบจะในทันที: เมื่อเราเปลี่ยนค่า PWM ให้เพิ่มเครื่องหมายถูกเป็น 0 - จากนั้นเราจะปิด PWM อย่างสมบูรณ์ คำถามเกิดขึ้น: จะปิดได้อย่างไร? คุณสามารถหยุดตัวจับเวลาได้ ไม่ ตัวเลือกที่ดีที่สุด: จะเกิดอะไรขึ้นหากมีการตั้งค่าอย่างอื่นในตัวจับเวลานี้? ตัวอย่างเช่น PWM ตัวที่สอง หรือการขัดจังหวะ หรือการนับถอยหลังสู่การระเบิด? คุณสามารถปิดเอาต์พุตตัวจับเวลาได้ - ดีกว่าเรียบง่ายและชัดเจนปรากฎดังนี้:
ถ้า(OCR0A==0)TCCR0A&=0x3F; อย่างอื่น TCCR0A=0x83;
หรือคุณสามารถเปลี่ยนโหมดการทำงานของขาเอาท์พุต/อินพุทได้เอง
ป.ล.
จากความคิดเห็นต่อบทความได้รับวิธีแก้ไขปัญหาต่อไปนี้:
1. หากไม่สำคัญที่จะต้องได้รับการเติม PWM 100% คุณสามารถใช้โหมดการทำงานของเอาต์พุตผกผันได้
2. เมื่อ PWM ทำงานในโหมด Phase Correct PWM ก็ไม่มีปัญหา



