แรงกระตุ้นทางไฟฟ้าคือแรงดันหรือกระแสไฟกระชากในระยะสั้น นั่นคือนี่คือเหตุการณ์ในวงจรที่แรงดันไฟฟ้าเพิ่มขึ้นอย่างรวดเร็วหลายเท่าและจากนั้นก็ลดลงอย่างรวดเร็วสู่ค่าเดิม ตัวอย่างที่ชัดเจนที่สุดคือแรงกระตุ้นทางไฟฟ้าที่ทำให้หัวใจเราเต้น สิ่งเดียวกัน จำนวนมากแรงกระตุ้นเกิดขึ้นในตัวเรา เซลล์ประสาทหัวและ ไขสันหลัง- เราคิดและแก้ไขบทเรียนด้วยแรงกระตุ้นทางไฟฟ้า!
แล้วอุปกรณ์อิเล็กทรอนิกส์ล่ะ? ในอุปกรณ์อิเล็กทรอนิกส์ มีการใช้พัลส์ทุกที่ ตัวอย่างเช่นในไมโครคอนโทรลเลอร์หรือแม้แต่ในโปรเซสเซอร์เต็มรูปแบบของคอมพิวเตอร์ที่บ้านแรงกระตุ้นทางไฟฟ้าจะกำหนดจังหวะการทำงานของมัน เรียกอีกอย่างว่าพัลส์นาฬิกาหรือพัลส์ซิงค์ บางครั้งประสิทธิภาพของคอมพิวเตอร์จะถูกเปรียบเทียบอย่างแม่นยำโดยใช้ค่าความเร็วสัญญาณนาฬิกา
ข้อมูลทั้งหมดอยู่ภายใน อุปกรณ์อิเล็กทรอนิกส์ยังถูกส่งผ่านโดยใช้แรงกระตุ้น อินเทอร์เน็ตแบบมีสายและไร้สายของเรา เซลล์และแม้แต่รีโมทคอนโทรลของทีวี - ทั้งหมดใช้สัญญาณพัลส์ เรามาลองทำงานหลายอย่างให้เสร็จสิ้นและทำความเข้าใจจากประสบการณ์ของเราเองถึงคุณสมบัติของการสร้างแรงกระตุ้นไฟฟ้า เริ่มต้นด้วยการทำความรู้จักกับคุณลักษณะที่สำคัญของพวกเขา
1. ระยะเวลาและรอบการทำงานของสัญญาณพัลส์
ลองนึกภาพว่าเรากำลังเตรียมตัวสำหรับปีใหม่และเราต้องทำพวงมาลัยแบบกระพริบตา เนื่องจากเราไม่รู้ว่าจะทำให้มันกระพริบตาได้อย่างไร เราจึงทำพวงมาลัยด้วยปุ่ม เราจะกดปุ่มเองจึงเชื่อมต่อวงจรพวงมาลัยเข้ากับแหล่งพลังงานและทำให้หลอดไฟสว่างขึ้น
แผนผังของพวงมาลัยที่ควบคุมด้วยตนเองจะมีลักษณะดังนี้:
เค้าโครงลักษณะที่ปรากฏ

เราประกอบวงจรและทำการทดสอบเล็กน้อย เรามาลองควบคุมพวงมาลัยตามอัลกอริทึมง่ายๆ:
- กดปุ่ม;
- รอ 1 วินาที;
- ปล่อยปุ่ม;
- รอ 2 วินาที;
- ไปที่จุดที่ 1
นี่คืออัลกอริธึมกระบวนการแบบแบตช์ โดยการกดปุ่มตามอัลกอริธึม เราจะสร้างสัญญาณพัลส์จริงขึ้นมา! ลองพรรณนาแผนภาพเวลาบนกราฟ
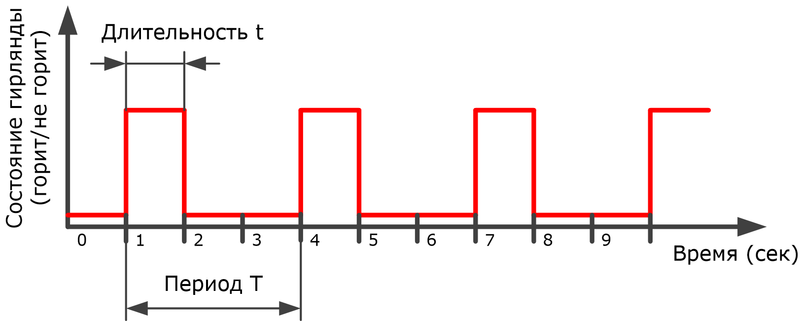
สำหรับสัญญาณที่กำหนด เราสามารถกำหนดระยะเวลาและความถี่ของการทำซ้ำได้ ระยะเวลาการทำซ้ำ (T)- นี่คือช่วงเวลาที่พวงมาลัยกลับสู่สภาพเดิม ส่วนนี้มองเห็นได้ชัดเจนในรูป เท่ากับสามวินาที ส่วนกลับของระยะเวลาการทำซ้ำเรียกว่า ความถี่ของสัญญาณคาบ (F)- ความถี่ของสัญญาณวัดเป็นเฮิรตซ์ ในกรณีของเรา:
F = 1/T = 1/3 = 0.33 เฮิรตซ์
ระยะเวลาการทำซ้ำสามารถแบ่งออกเป็นสองส่วน: เมื่อพวงมาลัยถูกจุดและเมื่อไม่ได้จุดพวงมาลัย ระยะเวลาที่พวงมาลัยถูกเรียกว่า ระยะเวลาชีพจร (t).
มาถึงส่วนที่สนุกแล้ว! เรียกว่าอัตราส่วนของระยะเวลาการทำซ้ำ (T) ต่อระยะเวลาพัลส์ (t) รอบหน้าที่.
ส = ที/ตัน
รอบหน้าที่ของสัญญาณของเราคือ S = 3/1 = 3. รอบการทำงานเป็นปริมาณที่ไร้มิติ
ในวรรณคดีอังกฤษมีการใช้คำอื่น - รอบหน้าที่- นี่คือส่วนกลับของรอบการทำงาน
D=1/S=t/T
ในกรณีของพวงมาลัยของเรา ปัจจัยการเติมคือ:
ง = 1/3 = 0.33(3) หยาบคาย 33%
ตัวเลือกนี้ชัดเจนยิ่งขึ้น D = 33% หมายความว่าหนึ่งในสามของช่วงเวลาถูกครอบครองโดยแรงกระตุ้น และตัวอย่างเช่น เมื่อ D = 50% ระยะเวลาของระดับสัญญาณสูงที่เอาต์พุตตัวจับเวลาจะเท่ากับระยะเวลา ระดับต่ำ.
2. การสร้างสัญญาณพัลส์โดยใช้ชิป 555
ทีนี้มาลองแทนที่บุคคลและปุ่มกัน เพราะเราไม่ต้องการเปิดและปิดพวงมาลัยทุกๆ 3 วินาทีตลอดวันหยุด
ในฐานะเครื่องกำเนิดพัลส์อัตโนมัติ เราใช้วงจรไมโครที่รู้จักกันดีในตระกูล 555 ไมโครวงจร 555 เป็นเครื่องกำเนิดพัลส์เดี่ยวหรือเป็นระยะที่มีคุณสมบัติเฉพาะ อีกทางหนึ่งไมโครวงจรประเภทนี้เรียกว่าตัวจับเวลา
มีการปรับเปลี่ยนตัวจับเวลา 555 ที่แตกต่างกันออกไป บริษัทที่แตกต่างกัน: KR1006VI1, NE555, TLC555, TLC551, LMC555. ตามกฎแล้วพวกเขาทั้งหมดมีพินชุดเดียวกัน

ผู้ผลิตยังแยกความแตกต่างของการทำงานของตัวจับเวลาสองโหมด: เครื่องสั่นเดี่ยวและมัลติไวเบรเตอร์ โหมดที่สองเหมาะสำหรับเราในโหมดนี้ตัวจับเวลาจะสร้างพัลส์อย่างต่อเนื่องตามพารามิเตอร์ที่ระบุ
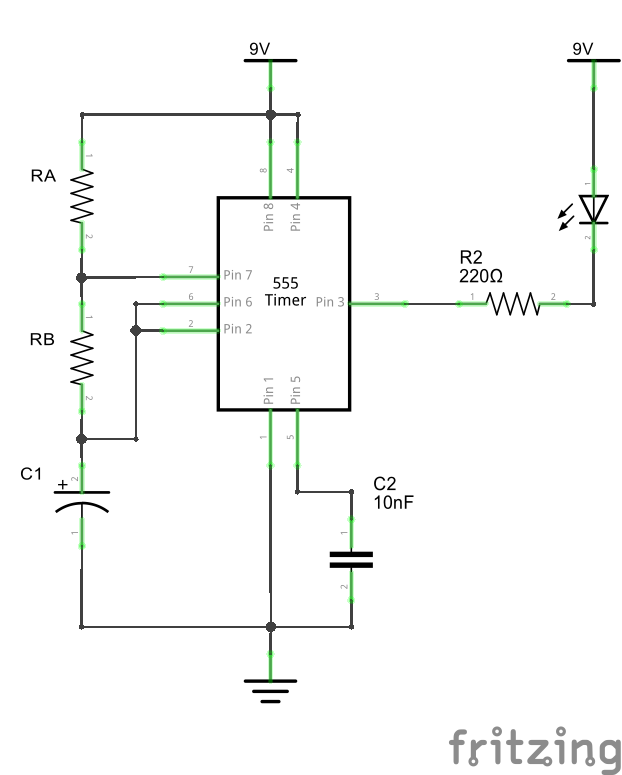
ตัวอย่างเช่น ลองเชื่อมต่อ LED หนึ่งตัวเข้ากับตัวจับเวลา 555 ยิ่งกว่านั้นเราใช้ตัวเลือกเมื่อขั้วบวกของ LED เชื่อมต่อกับแหล่งจ่ายไฟและต่อกราวด์เข้ากับตัวจับเวลา ต่อมาจะชัดเจนว่าทำไมเราถึงทำเช่นนี้
แผนภาพ
ลักษณะเค้าโครง

บันทึก.
วงจรนี้มีส่วนประกอบที่ไม่ได้รับการจัดอันดับสามองค์ประกอบ: ตัวต้านทาน Ra และ Rb และตัวเก็บประจุ C1 (ต่อไปนี้จะเรียกว่า C) ความจริงก็คือด้วยความช่วยเหลือขององค์ประกอบเหล่านี้จึงมีการกำหนดค่าคุณลักษณะของผลิตภัณฑ์ที่สร้างขึ้นที่เราต้องการ สัญญาณชีพจร- ทำได้โดยใช้สูตรง่าย ๆ ที่นำมาจากเอกสารทางเทคนิคสำหรับไมโครวงจร
T = 1/F = 0.693*(Ra + 2*Rb)*C; (1)
เสื้อ = 0.693*(Ra + Rb)*C; (2)
รา = T*1.44*(2*D-1)/C; (3)
Rb = T*1.44*(1-D)/C (4)
โดยที่ F คือความถี่ของสัญญาณ T—คาบชีพจร; เสื้อ คือระยะเวลาของมัน Ra และ Rb คือความต้านทานที่ต้องการ ตามสูตรเหล่านี้ ปัจจัยการเติมต้องไม่น้อยกว่า 50% (ไม่เช่นนั้นเราจะได้ ความหมายเชิงลบความต้านทาน). ข่าวอะไรอย่างนี้! เราควรทำอย่างไรกับพวงมาลัย? ตามสูตรของเรา รอบการทำงานของสัญญาณพัลส์จะต้องอยู่ที่ 33% อย่างแน่นอน
มีสองวิธีในการหลีกเลี่ยงข้อจำกัดนี้ วิธีแรกคือใช้รูปแบบการเชื่อมต่อตัวจับเวลาอื่น ยังมีอีกมาก วงจรที่ซับซ้อนซึ่งช่วยให้คุณเปลี่ยนแปลงพารามิเตอร์ D ในช่วงทั้งหมดได้ตั้งแต่ 0 ถึง 100% วิธีที่สองไม่จำเป็นต้องมีการดัดแปลงวงจร เราเพียงแค่กลับเอาต์พุตของตัวจับเวลา!
จริงๆแล้วในโครงการที่เสนอข้างต้นเราได้ทำไปแล้ว โปรดจำไว้ว่าเราเชื่อมต่อแคโทดของ LED เข้ากับเอาต์พุตของตัวจับเวลา ในวงจรนี้ LED จะสว่างขึ้นเมื่อเอาต์พุตตัวจับเวลาต่ำ
ถ้าเป็นเช่นนั้น เราจำเป็นต้องปรับความต้านทาน Ra และ Rb ของวงจรเพื่อให้รอบการทำงาน D เท่ากับ 66.6% เมื่อพิจารณาว่า T = 3 วินาทีและ D = 0.66 เราจะได้:
รา = 3*1.44*(2*0.66 - 1)/0.0001 = 13824 โอห์ม
Rb = 3*1.44*(1-D)/0.0001 = 14688 โอห์ม
จริงๆ แล้วถ้าเราใช้มากกว่านี้ ค่าที่แน่นอน D แล้วเราจะได้ Ra = Rb = 14400 โอห์ม ไม่น่าเป็นไปได้ที่เราจะพบตัวต้านทานที่มีค่าเช่นนี้ เป็นไปได้มากที่เราจะต้องใส่ตัวต้านทานหลายตัวต่ออนุกรม เช่น ตัวต้านทาน 1 ตัวต่อ 10 KOhm และ 4 ตัวต่อ 1 KOhm เพื่อความแม่นยำยิ่งขึ้น เราสามารถเพิ่มตัวต้านทาน 200 โอห์มได้อีกสองตัว
ผลลัพธ์ควรเป็นดังนี้:
วงจรนี้ใช้ตัวต้านทาน 15KΩ
3. การเชื่อมต่อกลุ่ม LED เข้ากับตัวจับเวลา 555
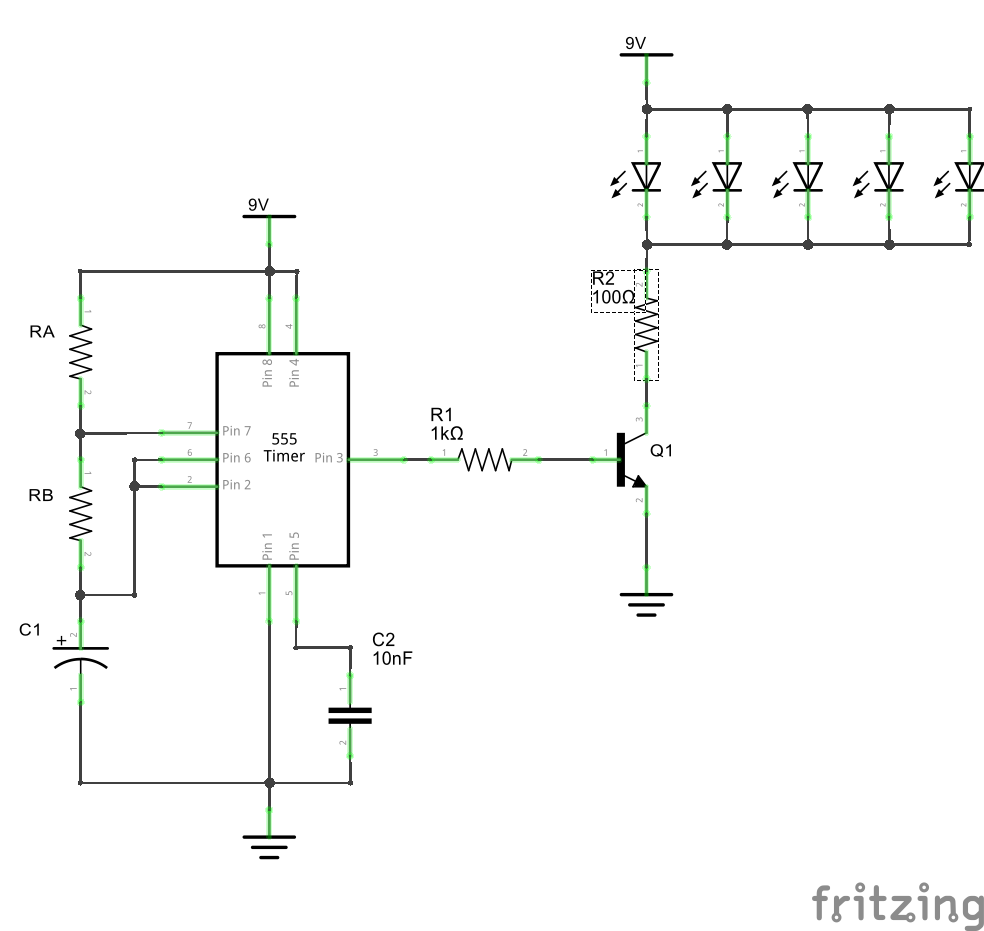
ตอนนี้เราได้เรียนรู้วิธีกำหนดจังหวะที่ต้องการแล้ว เรามาประกอบพวงมาลัยเล็กๆ กัน ใน โครงการใหม่ไฟ LED ห้าดวงจะเปิดเป็นเวลา 0.5 วินาทีทุกวินาที สำหรับจังหวะดังกล่าว Ra = 0, Rb = 7.2 kOhm นั่นคือแทนที่จะเป็นตัวต้านทาน Ra เราสามารถใส่จัมเปอร์ได้
เอาต์พุตของ IC 555 อ่อนเกินกว่าที่จะให้ไฟ LED 5 ดวงพร้อมกันได้ แต่ในพวงมาลัยจริงอาจมีได้ 15, 20 หรือมากกว่านั้น เพื่อแก้ไขปัญหานี้เราใช้ ทรานซิสเตอร์สองขั้ว, ทำงานกับโหมด กุญแจอิเล็กทรอนิกส์- ลองใช้ทรานซิสเตอร์ NPN ที่พบบ่อยที่สุด 2N2222 คุณยังสามารถใช้ทรานซิสเตอร์เอฟเฟกต์สนามแบบ N-channel เช่น 2N7000 ในวงจรนี้
LED ของเราจะต้องใช้ตัวต้านทานการตั้งค่ากระแส กระแสรวมของ LED ที่เชื่อมต่อแบบขนานห้าดวงควรเท่ากับ I = 20 mA*5 = 100 mA แรงดันไฟฟ้าของวงจรทั้งหมดคือ 9 โวลต์ บนไฟ LED สีแดงแรงดันไฟฟ้าจะลดลง 2 โวลต์ ดังนั้น กฎของโอห์มในวงจรส่วนนี้จึงมีลักษณะดังนี้:
100 มิลลิแอมป์ = (9V-2V)/ขวา;
ดังนั้น R2 = 7V/0.1A = 70 โอห์ม
ลองปัดความต้านทานเป็น 100 โอห์มซึ่งสามารถรับได้โดยการเชื่อมต่อตัวต้านทาน 200 โอห์มสองตัวแบบขนาน หรือคุณสามารถปล่อยตัวต้านทาน 200 โอห์มไว้หนึ่งตัวได้ LED จะหรี่ลงเล็กน้อย
แผนภาพ
ลักษณะเค้าโครง

บันทึก.ตัวเก็บประจุ C2 ไม่สามารถใช้ในวงจรได้
เราประกอบวงจรเชื่อมต่อแบตเตอรี่และสังเกตผลลัพธ์ หากทุกอย่างทำงานได้ตามปกติ เราจะรวบรวมความรู้ของเราด้วยการสร้างอุปกรณ์สนุกๆ
งาน
- เครื่องกำเนิดเสียง ในวงจรพวงมาลัย ให้เปลี่ยนกลุ่ม LED เป็นลำโพงเพียโซ เพิ่มความถี่เสียง เช่น เป็น 100 Hz หากเพิ่มความถี่เป็น 15 kHz ก็ไล่ยุงได้!
- สัญญาณไฟจราจรทางรถไฟ. เชื่อมต่อ LED สองดวงเข้ากับตัวจับเวลา เพื่อให้อันหนึ่งเชื่อมต่อกับตัวจับเวลาโดยแคโทด และอันที่สองเชื่อมต่อกับขั้วบวก ตั้งค่าความถี่พัลส์เป็น 1 Hz
บทสรุป
ดังที่ได้กล่าวไปแล้ว 555 timer เป็นชิปที่ได้รับความนิยมอย่างมาก เนื่องจากอุปกรณ์อิเล็กทรอนิกส์ส่วนใหญ่มีลักษณะเป็นกระบวนการเป็นระยะ เสียงใด ๆ ที่เป็นกระบวนการเป็นระยะ สัญญาณ PWM ที่ควบคุมความเร็วของมอเตอร์จะเป็นสัญญาณเป็นระยะและมีรอบการทำงานที่แตกต่างกัน และดังที่ได้กล่าวไปแล้วการทำงานของไมโครคอนโทรลเลอร์และโปรเซสเซอร์นั้นขึ้นอยู่กับสัญญาณนาฬิกาที่มีความถี่ที่แม่นยำมาก
ในบทต่อไป เราจะสร้างนาฬิกาไบนารีโดยใช้ตัวจับเวลาและตัวนับไบนารี มันจะยากขึ้นอีกหน่อย แต่น่าสนใจยิ่งขึ้น!
ขายในราคาเพียงเพนนี - ตามกฎแล้วไมโครวงจรในรุ่น SMD มีราคาประมาณ 5 รูเบิลลึก - 7-10 รูเบิล โดยเฉพาะนักวิทยุสมัครเล่นอย่างฉัน ไม่ช้าก็เร็วต้องใช้เครื่องกำเนิดที่ค่อนข้างแม่นยำ ปรับได้ และเรียบง่าย การออกแบบต่างๆ- ฉันต้องการอุปกรณ์เพื่อทำความคุ้นเคยกับการทำงานของออสซิลโลสโคป พบ โครงการที่น่าสนใจในบทความซึ่งอธิบายว่าเป็นผู้ทดสอบตัวจับเวลาเพื่อตรวจสอบความสามารถในการให้บริการ
แผนผังของเครื่องกำเนิดพัลส์บนตัวจับเวลา

เครื่องกำเนิดไฟฟ้าผลิตพัลส์สี่เหลี่ยม ระยะเวลาการสั่นสัมพันธ์กับค่าของตัวต้านทาน R1, R2 และตัวเก็บประจุ C1 ฉันแก้ไขไดอะแกรมเล็กน้อย วาดตราของตัวเอง แม้ว่าฉันจะวาดมันภายใต้ SMD แต่ท้ายที่สุดก็ตัดสินใจติดตั้ง Dip


แทนที่จะใช้ตัวต้านทานถาวร มีการติดตั้งตัวต้านทานควบคุม 100 kOhm สองตัวสำหรับการปรับ ซึ่งเป็นของใหม่พร้อมการปรับที่ดี
เอาต์พุตตัวจับเวลา (พิน 3) จะถูกหารด้วยตัวเก็บประจุนาโนฟารัด 100 ตัวซึ่งเป็นเซรามิกธรรมดา เพื่อป้องกันไม่ให้เอาต์พุตลัดวงจรหรือระดับสัญญาณสูงเกินไป มีการติดตั้งไดโอดแก้วที่อินพุตพลังงานของไมโครวงจรซึ่งป้องกันวงจรจากการกลับขั้วของแบตเตอรี่ - เพื่อไม่ให้เกิดไฟไหม้หากคุณเชื่อมต่อขั้วไม่ถูกต้องเพื่อบ่งชี้ว่ามีการติดตั้ง LED พร้อมตัวต้านทานจำกัดกระแส - นี่คือวิธีที่คุณจะเห็นเมื่ออุปกรณ์เปิดและทำงานตัวต้านทานส่วนใหญ่ในวงจรใช้ในการออกแบบระนาบเพื่อลดขนาดและทำให้การติดตั้งง่ายขึ้นโดยไม่ต้องเจาะ ใช้ขนาดมาตรฐาน1206 .

วงจรเครื่องกำเนิดไฟฟ้าได้รับการควบคุมอย่างดีในช่วงกว้าง การปรับค่าด้วยเรตติ้งที่สูงของหน่วยงานกำกับดูแลนั้นเป็นสิ่งที่ดี ในระหว่างการทดสอบ อุปกรณ์ใช้พลังงานจากแบตเตอรี่ 6 โวลต์ การใช้กระแสไฟอยู่ที่ 15-25 mA ขึ้นอยู่กับโหมดหุ่นยนต์ซึ่งส่งออกโดยแถบเลื่อนตัวควบคุมฉันไม่แนะนำให้วางไว้ในตำแหน่งที่รุนแรง ขอแนะนำให้วางไว้ในอนุกรมพร้อมกับตัวต้านทานการปรับค่าในวงจรและตัวต้านทานกิโลโอห์มอีกสองสามตัวเพื่อความน่าเชื่อถือ แต่ผ้าพันคอธรรมดานี้ทำขึ้น การแก้ไขอย่างรวดเร็วสำหรับการทดสอบที่ง่ายที่สุด ก็ไม่เป็นไร

คุณยังสามารถสร้างเครื่องกำเนิดการสั่นแบบฟันเลื่อยโดยใช้ตัวจับเวลา 555

เมื่อมีแรงดันไฟฟ้าระดับสูงที่เอาต์พุตของตัวจับเวลา ตัวเก็บประจุ C1 จะถูกชาร์จอย่างช้าๆ จากแหล่งจ่ายกระแสถึง ทรานซิสเตอร์สนามผล- ทันทีที่แรงดันไฟฟ้าบนตัวเก็บประจุถึงระดับ 2Upit / 3 ระดับสูงแรงดันไฟฟ้าที่เอาต์พุตของตัวจับเวลาจะเปลี่ยนเป็นต่ำและตัวเก็บประจุจะคายประจุอย่างรวดเร็วผ่านทรานซิสเตอร์ภายในแบบเปิดของไมโครวงจร
วีดีโอการทำงานของวงจร
ความถี่ในการสร้างถูกกำหนดโดยระดับแหล่งที่มา กระแสตรงบนทรานซิสเตอร์สนามผลและความจุของตัวเก็บประจุ C1 ระยะเวลาการสั่นของเครื่องกำเนิดไฟฟ้าเท่ากับ Т=C1.อัพพิท/(3I) - วงจรนี้ประกอบและทดสอบโดยเรดมูน
เส้นทางสู่วิทยุสมัครเล่นมักเริ่มต้นด้วยความพยายามที่จะประกอบวงจรง่ายๆ หากทันทีหลังจากการประกอบวงจรเริ่มแสดงสัญญาณของชีวิต - กะพริบ, การรับสารภาพ, คลิกหรือพูดคุยแสดงว่าเส้นทางสู่วิทยุสมัครเล่นเกือบจะเปิดแล้ว สำหรับการ "พูดคุย" เป็นไปได้มากว่าจะไม่สามารถทำได้ในทันที สำหรับสิ่งนี้ คุณจะต้องอ่านหนังสือมากมาย ประสานและปรับวงจรจำนวนหนึ่ง อาจจะเผาชิ้นส่วนขนาดใหญ่หรือเล็ก (โดยเฉพาะ อันเล็ก)
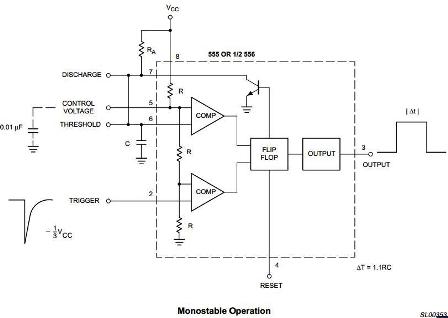
แต่เกือบทุกคนสามารถรับไฟกะพริบและเสียงบี๊บได้ทันที และเป็นไปไม่ได้เลยที่จะหาองค์ประกอบที่ดีกว่าสำหรับการทดลองเหล่านี้ ก่อนอื่นเรามาดูวงจรเครื่องกำเนิดไฟฟ้า แต่ก่อนหน้านั้นเรามาดูเอกสารประกอบที่เป็นกรรมสิทธิ์ - DATA SHEET ก่อนอื่น มาดูโครงร่างกราฟิกของตัวจับเวลากันก่อน ดังแสดงในรูปที่ 1
และรูปที่ 2 แสดงภาพเครื่องจับเวลาจากหนังสืออ้างอิงในประเทศ ในที่นี้นำเสนอเพียงเพื่อให้สามารถเปรียบเทียบการกำหนดสัญญาณระหว่างพวกเขากับเราได้ นอกเหนือจาก "ของเรา" แผนภาพการทำงานแสดงให้เห็นอย่างละเอียดและชัดเจนยิ่งขึ้น
ภาพที่ 1.
รูปที่ 2.
ยิงนัดเดียวตาม 555
รูปที่ 3 แสดงวงจรแบบช็อตเดียว ไม่ นี่ไม่ใช่ครึ่งหนึ่งของมัลติไวเบรเตอร์ แม้ว่าตัวมันเองจะไม่สามารถสร้างการสั่นได้ก็ตาม เขาต้องการความช่วยเหลือจากภายนอก แม้ว่าจะเพียงเล็กน้อยก็ตาม
รูปที่ 3 วงจรช็อตเดียว
ตรรกะของการดำเนินการแบบนัดเดียวนั้นค่อนข้างง่าย อินพุตทริกเกอร์ 2 รับพัลส์ระดับต่ำชั่วขณะดังแสดงในรูป เป็นผลให้เอาต์พุต 3 สร้างพัลส์สี่เหลี่ยมโดยมีระยะเวลา ΔT = 1.1*R*C หากเราแทน R เป็นโอห์มและ C เป็นฟารัดลงในสูตร เวลา T จะเป็นวินาที ดังนั้นด้วยกิโลโอห์มและไมโครฟารัด ผลลัพธ์จะเป็นมิลลิวินาที
และรูปที่ 4 แสดงวิธีสร้างทริกเกอร์พัลส์โดยใช้ปุ่มกลไกง่ายๆ แม้ว่าอาจเป็นองค์ประกอบเซมิคอนดักเตอร์ก็ตาม เช่น ไมโครวงจรหรือทรานซิสเตอร์
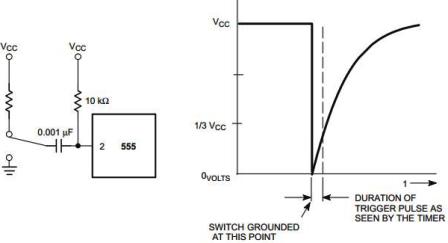
รูปที่ 4.
โดยทั่วไป monovibrator (บางครั้งเรียกว่า monovibrator และทหารผู้กล้าหาญใช้คำว่า kipp Relay) ทำงานดังนี้ เมื่อกดปุ่ม พัลส์ระดับต่ำบนพิน 2 จะทำให้เอาท์พุตของตัวจับเวลา 3 สูงขึ้น ไม่ใช่เพื่ออะไรเลยที่สัญญาณนี้ (พิน 2) เรียกว่าการเปิดตัวในหนังสืออ้างอิงในประเทศ
ทรานซิสเตอร์ที่เชื่อมต่อกับพิน 7 (DISCHARGE) จะถูกปิดในสถานะนี้ ดังนั้นจึงไม่มีอะไรขัดขวางการชาร์จตัวเก็บประจุเวลา C ในสมัยของรีเลย์ kipp แน่นอนว่าไม่มี 555 ทุกอย่างทำได้โดยใช้หลอดหรืออย่างดีที่สุดคือทรานซิสเตอร์แยก แต่อัลกอริธึมการทำงานเหมือนกัน
ในขณะที่ตัวเก็บประจุกำลังชาร์จ แรงดันไฟขาออกจะยังคงอยู่ในระดับสูง หากในเวลานี้พัลส์อื่นถูกนำไปใช้กับอินพุต 2 สถานะของเอาท์พุตจะไม่เปลี่ยนแปลง ระยะเวลาของพัลส์เอาท์พุตไม่สามารถลดลงหรือเพิ่มขึ้นในลักษณะนี้ และการรีสตาร์ทครั้งเดียวจะไม่เกิดขึ้น
เป็นอีกเรื่องหนึ่งหากคุณใช้พัลส์รีเซ็ต (ระดับต่ำ) เพื่อพิน 4 เอาต์พุต 3 จะต่ำทันที สัญญาณรีเซ็ตมีลำดับความสำคัญสูงสุดและสามารถออกได้ตลอดเวลา
ขณะที่ชาร์จ แรงดันไฟฟ้าตกคร่อมตัวเก็บประจุจะเพิ่มขึ้นและในที่สุดจะถึง 2/3U ตามที่อธิบายไว้ในบทความก่อนหน้านี้ นี่คือระดับทริกเกอร์ ซึ่งเป็นเกณฑ์ของตัวเปรียบเทียบด้านบน ซึ่งนำไปสู่การรีเซ็ตตัวจับเวลา ซึ่งเป็นจุดสิ้นสุดของพัลส์เอาท์พุต
ที่พิน 3 ระดับต่ำจะปรากฏขึ้นและในขณะเดียวกัน ทรานซิสเตอร์ VT3 จะเปิดขึ้น ซึ่งจะปล่อยประจุตัวเก็บประจุ C ซึ่งจะทำให้การก่อตัวของพัลส์เสร็จสมบูรณ์ หากหลังจากสิ้นสุดพัลส์เอาท์พุต แต่ไม่ใช่ก่อนหน้านี้ พัลส์ทริกเกอร์อื่นถูกใช้ พัลส์เอาท์พุตจะถูกสร้างขึ้นที่เอาท์พุตเหมือนกับอันแรก
แน่นอนว่า สำหรับการใช้งานปกติของอุปกรณ์แบบช็อตเดียว พัลส์ที่กระตุ้นจะต้องสั้นกว่าพัลส์ที่สร้างที่เอาท์พุต
รูปที่ 5 แสดงกราฟการทำงานของอุปกรณ์ one-shot
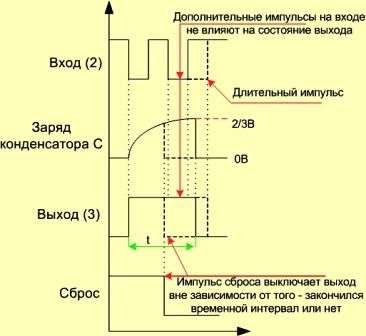
รูปที่ 5 ตารางการทำงานของเครื่องสั่นเดี่ยว
คุณจะใช้อุปกรณ์ one-shot ได้อย่างไร?
หรืออย่างที่แมว Matroskin เคยพูดว่า: "เครื่องโมโนไวเบรเตอร์ตัวนี้จะทำอะไรดี" ตอบได้เลยว่าค่อนข้างใหญ่ ความจริงก็คือช่วงเวลาหน่วงที่ได้รับจากเครื่องสั่นเดี่ยวนี้ไม่เพียงแต่อาจถึงหลายมิลลิวินาที แต่ยังนานถึงหลายชั่วโมงด้วย ทุกอย่างขึ้นอยู่กับพารามิเตอร์ของไทม์มิ่ง RC chain
เอาล่ะ เกือบแล้ว โซลูชั่นสำเร็จรูปเพื่อส่องสว่างทางเดินยาว ก็เพียงพอที่จะเสริมตัวจับเวลาด้วยรีเลย์ผู้บริหารหรือวงจรไทริสเตอร์ธรรมดาแล้ววางปุ่มสองสามปุ่มไว้ที่ปลายทางเดิน! ฉันกดปุ่มเดินผ่านทางเดินและไม่ต้องกังวลเรื่องการปิดหลอดไฟ ทุกอย่างจะเกิดขึ้นโดยอัตโนมัติเมื่อสิ้นสุดการหน่วงเวลา นี่เป็นเพียงอาหารสำหรับความคิด แน่นอนว่าแสงสว่างในทางเดินยาวไม่ได้เป็นเพียงกรณีการใช้งานแบบโมโนสเตเบิลเท่านั้น
จะตรวจสอบยังไง 555?
วิธีที่ง่ายที่สุดคือการบัดกรีวงจรง่ายๆ โดยแทบไม่ต้องต่ออะไรเลย ยกเว้นตัวต้านทานแบบปรับค่าได้ตัวเดียวและไฟ LED เพื่อแสดงสถานะเอาต์พุต
ไมโครวงจรควรเชื่อมต่อพิน 2 และ 6 และใช้แรงดันไฟฟ้ากับพวกมันซึ่งเปลี่ยนโดยตัวต้านทานแบบปรับค่าได้ คุณสามารถเชื่อมต่อโวลต์มิเตอร์หรือ LED เข้ากับเอาต์พุตของตัวจับเวลาได้โดยใช้ตัวต้านทานแบบจำกัด
แต่คุณไม่จำเป็นต้องประสานอะไรเลย ยิ่งไปกว่านั้นคุณสามารถทำการทดลองได้แม้จะ "ไม่มี" วงจรไมโครก็ตาม การศึกษาที่คล้ายกันสามารถทำได้โดยใช้โปรแกรมจำลอง Multisim แน่นอนว่าการวิจัยดังกล่าวเป็นเรื่องดั้งเดิมมาก แต่ก็ช่วยให้คุณทำความคุ้นเคยกับตรรกะของผลลัพธ์ 555 ได้ งานห้องปฏิบัติการ» แสดงในรูปที่ 6, 7 และ 8
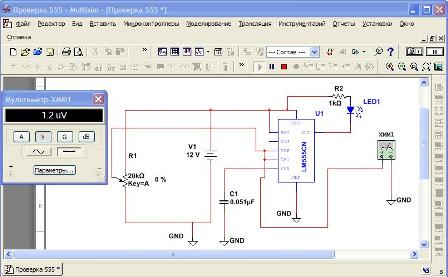
รูปที่ 6.
ในรูปนี้คุณจะเห็นว่าแรงดันไฟฟ้าขาเข้าถูกควบคุมโดยตัวต้านทานผันแปร R1 ใกล้ๆ กัน คุณจะเห็นข้อความว่า "Key = A" ซึ่งบ่งชี้ว่าค่าของตัวต้านทานสามารถเปลี่ยนแปลงได้โดยการกดปุ่ม A ขั้นตอนการปรับขั้นต่ำคือ 1% แต่น่าผิดหวังที่การควบคุมทำได้ในทิศทางของเท่านั้น การเพิ่มความต้านทานและลดทำได้ด้วยเมาส์เท่านั้น "
ในรูปนี้ตัวต้านทานถูก "นำ" ไปจนถึง "กราวด์" แรงดันไฟฟ้าของมอเตอร์ใกล้กับศูนย์ (เพื่อความชัดเจนวัดด้วยมัลติมิเตอร์) ด้วยตำแหน่งเครื่องยนต์นี้ เอาท์พุตของตัวจับเวลาจะสูง ดังนั้นทรานซิสเตอร์เอาท์พุตจึงถูกปิด และ LED1 จะไม่สว่าง ตามที่ระบุด้วยลูกศรสีขาว
รูปต่อไปนี้แสดงว่าแรงดันไฟฟ้าเพิ่มขึ้นเล็กน้อย

รูปที่ 7.
แต่การเพิ่มขึ้นไม่ได้เกิดขึ้นเช่นนั้น แต่เป็นไปตามขอบเขตบางประการ กล่าวคือ เกณฑ์การปฏิบัติงานของผู้เปรียบเทียบ ความจริงก็คือ 1/3 และ 2/3 ถ้าแสดงเป็น ทศนิยมเปอร์เซ็นต์จะเป็น 33.33... และ 66.66... ตามลำดับ ส่วนที่ป้อนจะแสดงเป็นเปอร์เซ็นต์ ตัวต้านทานแบบแปรผันในโปรแกรม Multisim ด้วยแรงดันไฟฟ้า 12V จะกลายเป็น 4 และ 8 โวลต์ซึ่งค่อนข้างสะดวกสำหรับการวิจัย
ดังนั้น รูปที่ 6 แสดงว่าตัวต้านทานถูกใส่ไว้ที่ 65% และแรงดันไฟฟ้าที่ตกคร่อมอยู่ที่ 7.8V ซึ่งน้อยกว่าค่า 8 โวลต์ที่คำนวณได้เล็กน้อย ในกรณีนี้ LED เอาท์พุตจะดับลง เช่น เอาต์พุตตัวจับเวลายังคงสูง

รูปที่ 8.
แรงดันไฟฟ้าที่เพิ่มขึ้นอีกเล็กน้อยที่อินพุต 2 และ 6 เพียง 1 เปอร์เซ็นต์ (โปรแกรมไม่อนุญาตให้น้อยลง) นำไปสู่การส่องสว่างของ LED1 ซึ่งแสดงในรูปที่ 8 - ลูกศรที่อยู่ใกล้ LED ได้รับโทนสีแดง ลักษณะการทำงานของวงจรนี้บ่งชี้ว่าเครื่องจำลอง Multisim ทำงานค่อนข้างแม่นยำ
หากคุณยังคงเพิ่มแรงดันไฟฟ้าบนพิน 2 และ 6 ต่อไปจะไม่มีการเปลี่ยนแปลงที่เอาต์พุตตัวจับเวลา
เครื่องกำเนิดไฟฟ้าบนไทม์เมอร์ 555
ช่วงความถี่ที่สร้างโดยตัวจับเวลาค่อนข้างกว้าง: จากความถี่ต่ำสุดซึ่งเป็นระยะเวลาหลายชั่วโมงไปจนถึงความถี่หลายสิบกิโลเฮิรตซ์ ทุกอย่างขึ้นอยู่กับองค์ประกอบของโซ่ไทม์มิ่ง
หากไม่จำเป็นอย่างยิ่ง รูปร่างสี่เหลี่ยมสัญญาณจากนั้นจึงสามารถสร้างความถี่ได้สูงถึงหลายเมกะเฮิรตซ์ บางครั้งสิ่งนี้ก็เป็นที่ยอมรับได้อย่างสมบูรณ์ - แบบฟอร์มไม่สำคัญ แต่มีแรงกระตุ้นอยู่ บ่อยครั้งที่ความประมาทเลินเล่อเกี่ยวกับรูปร่างของพัลส์นั้นได้รับอนุญาตในเทคโนโลยีดิจิทัล ตัวอย่างเช่น ตัวนับชีพจรจะตอบสนองต่อการขึ้นหรือลงของพัลส์ เห็นด้วยในกรณีนี้ "ความเป็นสี่เหลี่ยม" ของพัลส์ไม่สำคัญเลย
เครื่องกำเนิดพัลส์คลื่นสี่เหลี่ยม
หนึ่งใน ตัวเลือกที่เป็นไปได้เครื่องกำเนิดพัลส์คลื่นสี่เหลี่ยมแสดงในรูปที่ 9

รูปที่ 9 แผนผังของเครื่องกำเนิดพัลส์คลื่นสี่เหลี่ยม
แผนภาพเวลาการทำงานของเครื่องกำเนิดไฟฟ้าแสดงในรูปที่ 10

รูปที่ 10 แผนภาพเวลาการทำงานของเครื่องกำเนิดไฟฟ้า
กราฟด้านบนแสดงสัญญาณเอาท์พุต (พิน 3) ของตัวจับเวลา และกราฟด้านล่างแสดงให้เห็นว่าแรงดันไฟฟ้าเปลี่ยนแปลงไปอย่างไรในตัวเก็บประจุไทม์มิ่ง
ทุกอย่างเกิดขึ้นในลักษณะเดียวกับที่ได้กล่าวไว้แล้วในวงจร one-shot ที่แสดงในรูปที่ 3 โดยไม่ได้ใช้เฉพาะพัลส์เดี่ยวที่ทริกเกอร์ที่พิน 2 เท่านั้น
ความจริงก็คือเมื่อวงจรเปิดอยู่แรงดันไฟฟ้าของตัวเก็บประจุ C1 จะเป็นศูนย์และนี่คือสิ่งที่จะเปลี่ยนเอาต์พุตตัวจับเวลาให้อยู่ในสถานะระดับสูงดังแสดงในรูปที่ 10 ตัวเก็บประจุ C1 เริ่มชาร์จผ่านตัวต้านทาน R1
แรงดันไฟฟ้าตกคร่อมตัวเก็บประจุจะเพิ่มขึ้นแบบทวีคูณจนกระทั่งถึงเกณฑ์ทริกเกอร์บนที่ 2/3*U เป็นผลให้ตัวจับเวลาเปลี่ยนเป็นสถานะศูนย์ ดังนั้นตัวเก็บประจุ C1 จึงเริ่มคายประจุจนถึงเกณฑ์ล่างที่ 1/3*U เมื่อถึงเกณฑ์นี้ เอาท์พุตตัวจับเวลาจะสูงและทุกอย่างจะเริ่มต้นใหม่อีกครั้ง คาบใหม่ของการแกว่งเกิดขึ้น
ที่นี่คุณควรใส่ใจกับความจริงที่ว่าตัวเก็บประจุ C1 ถูกชาร์จและคายประจุผ่านตัวต้านทาน R1 ตัวเดียวกัน ดังนั้นเวลาในการชาร์จและคายประจุจึงเท่ากัน และด้วยเหตุนี้ รูปร่างการสั่นที่เอาท์พุตของเครื่องกำเนิดไฟฟ้าจึงอยู่ใกล้กับทางคดเคี้ยว
ความถี่การสั่นของเครื่องกำเนิดไฟฟ้าดังกล่าวอธิบายได้ด้วยสูตรที่ซับซ้อนมาก f = 0.722/(R1*C1) หากระบุความต้านทานของตัวต้านทาน R1 เป็นโอห์มระหว่างการคำนวณ และความจุของตัวเก็บประจุ C1 อยู่ในหน่วยฟารัด ความถี่จะได้รับเป็นเฮิรตซ์ หากในสูตรนี้ ความต้านทานแสดงเป็นกิโลโอห์ม (KOhm) และความจุของตัวเก็บประจุเป็นไมโครฟารัด (μF) ผลลัพธ์จะเป็นกิโลเฮิรตซ์ (KHz) เพื่อรับเครื่องกำเนิดไฟฟ้าด้วย ความถี่ที่ปรับได้ก็เพียงพอที่จะเปลี่ยนตัวต้านทาน R1 ด้วยตัวแปรหนึ่งตัว
เครื่องกำเนิดพัลส์ด้วย รอบหน้าที่ปรับได้
แน่นอนว่าการคดเคี้ยวเป็นสิ่งที่ดี แต่บางครั้งสถานการณ์เกิดขึ้นซึ่งจำเป็นต้องมีการควบคุมวงจรการทำงานของพัลส์ นี่คือวิธีการควบคุมความเร็วในการหมุนของมอเตอร์กระแสตรง (ตัวควบคุม PWM) ซึ่งเป็นความเร็วที่มีแม่เหล็กถาวร
คลื่นสี่เหลี่ยมคือพัลส์สี่เหลี่ยมซึ่งเวลาพัลส์ (ระดับสูง t1) เท่ากับเวลาหยุดชั่วคราว (ระดับต่ำ t2) ชื่อในอุปกรณ์อิเล็กทรอนิกส์นี้มาจากสถาปัตยกรรม ซึ่งคดเคี้ยวเรียกว่ารูปแบบ งานก่ออิฐ- เวลารวมของพัลส์และการหยุดชั่วคราวเรียกว่าช่วงพัลส์ (T = t1 + t2)
รอบหน้าที่และรอบหน้าที่
อัตราส่วนของช่วงพัลส์ต่อระยะเวลา S = T/t1 เรียกว่ารอบการทำงาน นี่เป็นปริมาณที่ไร้มิติ สำหรับการคดเคี้ยว ตัวบ่งชี้นี้คือ 2 เนื่องจาก t1 = t2 = 0.5*T ในวรรณคดีภาษาอังกฤษ แทนที่จะใช้วัฏจักรหน้าที่ ค่าผกผันมักถูกใช้บ่อยกว่า - วัฏจักรหน้าที่ (อังกฤษ: วัฏจักรหน้าที่) D = 1/S แสดงเป็นเปอร์เซ็นต์
หากคุณปรับปรุงเครื่องกำเนิดไฟฟ้าที่แสดงในรูปที่ 9 เล็กน้อย คุณจะได้เครื่องกำเนิดไฟฟ้าที่มีรอบการทำงานที่ปรับได้ วงจรของเครื่องกำเนิดไฟฟ้าดังกล่าวแสดงในรูปที่ 11

รูปที่ 11.
ในวงจรนี้ประจุของตัวเก็บประจุ C1 เกิดขึ้นตามวงจร R1, RP1, VD1 เมื่อแรงดันไฟฟ้าบนตัวเก็บประจุถึงเกณฑ์บนที่ 2/3*U ตัวจับเวลาจะสลับไปที่สถานะระดับต่ำและตัวเก็บประจุ C1 จะถูกคายประจุผ่านวงจร VD2, RP1, R1 จนกระทั่งแรงดันไฟฟ้าบนตัวเก็บประจุลดลงถึงเกณฑ์ล่างของ 1/3*U หลังจากที่เหตุใดวงจรจึงเกิดซ้ำ
การเปลี่ยนตำแหน่งของแถบเลื่อน RP1 ทำให้สามารถปรับระยะเวลาการชาร์จและการคายประจุได้: หากระยะเวลาการชาร์จเพิ่มขึ้น เวลาในการคายประจุจะลดลง ในกรณีนี้ ระยะเวลาการเกิดซ้ำของพัลส์ยังคงไม่เปลี่ยนแปลง มีเพียงรอบการทำงานหรือรอบการทำงานเท่านั้นที่เปลี่ยนแปลง ก็ขึ้นอยู่กับว่าใครสะดวกกว่ากัน
ด้วยตัวจับเวลา 555 คุณสามารถออกแบบได้ไม่เพียงแต่เครื่องกำเนิดไฟฟ้าเท่านั้น แต่ยังออกแบบอื่นๆ อีกมากมายอีกด้วย อุปกรณ์ที่มีประโยชน์ซึ่งจะกล่าวถึงในบทความถัดไป อย่างไรก็ตามมีโปรแกรมเครื่องคิดเลขสำหรับคำนวณความถี่ของเครื่องกำเนิดไฟฟ้าในตัวจับเวลา 555 และในโปรแกรมจำลอง Multisim จะมีแท็บพิเศษสำหรับวัตถุประสงค์เหล่านี้
บอริส อลาดีชคิน
ความต่อเนื่องของบทความ:



